At Sonardyne we are experts at manufacturing and deploying sensors underwater for prolonged periods of time. We offer solutions that are ready to be deployed now. We configure them with modular building blocks meaning that we can work with customers to meet new requirements. In this series of blogs, Ioseba Tena will be looking at examples of long-endurance sensors we can deploy today, why it’s perhaps not as easy as you think to do this, and, finally, a closer look at how our systems are built. Let’s get started.
Submarines have been a persistent threat since their invention. They are capable of operating while remaining undetected and, therefore, projecting force in remote locations. Since the introduction of nuclear-powered systems, they have been able to remain on prolonged deployments. Today, the threat no longer stops there. Unmanned underwater vehicles (UUVs) and a new generation of extra-large UUVs (XLUUVs), with increased range and more capable payloads, are now being introduced to support incumbent nuclear submarine fleets.
Traditional anti-submarine warfare (ASW), while effective, requires significant investment and ties up our warfighting ships – our nations’ prized assets – to the task of trailing possible contacts. As the number of threats proliferate, we become limited by our ability to grow our fleets. This means we need to find new ways to achieve scale.
Leveraging uncrewed systems for ASW operations
Our own unmanned systems can come to the rescue, helping us to project our own strength and our ASW capability, by detecting threats further away and providing us with the opportunity to react to them sooner; informing our fleet before the threat reaches its target.
What better way to do this than deploying unattended sensors at choke points to help monitor persistently or even to have them support our XLUUV fleet in finding its way? They can be part of the ASW mix, by passively monitoring known routes. Alternatively, they can be used by XLUUVs to upload and download data or take/adjust their marching orders based on recent observations.
Today’s unattended sensors can be formidably capable. We have been operating them for a long time in the commercial and ocean science sectors. Our close to five decades of experience in instrumenting the underwater domain has seen us deliver systems in all types of environments in support of everything from oceanographic missions and long-term geological studies to persistent monitoring of subsea assets. The technology is field proven and can change the game.
What can our unattended sensors do today?
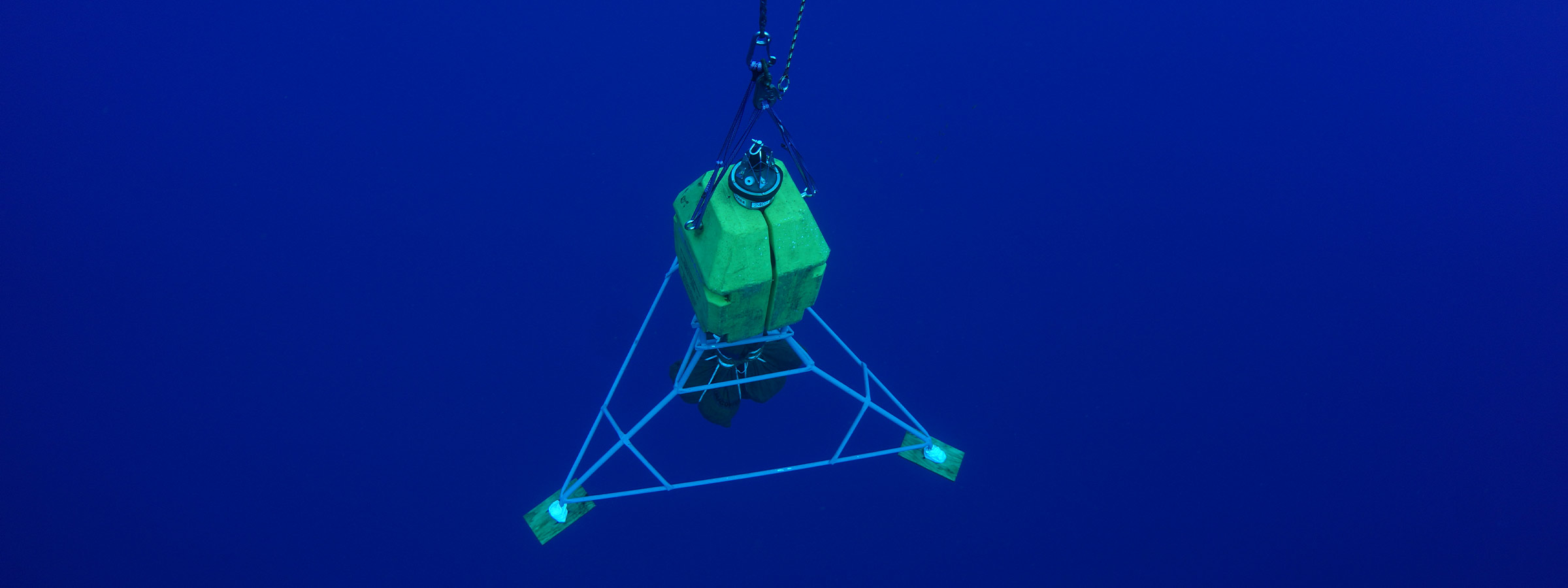
Take for instance our Pressure Inverted Echo Sounders (PIES) used in support of oceanographic missions and measuring average sound speed in the water column. PIES can be configured for autonomous monitoring over periods of several months or multiple years. PIES use an up chirp to accurately measure two-way travel-time through the water column. Simultaneously, they also measure pressure at the seabed. Pressure measurements are converted to depth to find the acoustic distance travelled from the seabed to the surface and back again. By combining the depth and travel time, the average sound speed in the water column can be calculated. An embedded acoustic modem allows you to retrieve that data – i.e. two-way travel-time in seconds and pressure in kilo Pascals.
By strategically deploying arrays of PIES we can persistently monitor sound speed profiles across a large body of water. This data can be harvested using our acoustic modems mounted on surface assets like uncrewed surface vessels (USVs) and used in direct support of ASW operations.
Autonomous navigation anywhere

If you need to support underwater navigation, our Autonomous Monitoring Transponder (AMT) is a long-endurance transponder, extensively used for subsea survey tasks and capable of autonomously acquiring acoustic ranges and sensor data without surface control. It can be used to provide a range and a local navigation reference in aid of inertial navigation systems; providing a constant reference to any underwater traffic.
- Deploy it anywhere for prolonged periods of time.
- It can be programmed to wait in silence until activated by a known acoustic signal to then provide a range to a known location, which can be used as a navigation aid.
- It can be programmed to provide updates at regular intervals.
- The AMT can be used as a forward deployed navigation outpost, providing a used to aid the navigation of XLUUV systems.
- It can also be used in support of surface craft navigation when GNSS denial is a threat.
- Surface craft can be equipped with ultra-short baseline navigation systems and navigate relative to an AMT on a known location.
We have decades of experience designing, manufacturing, deploying and recovering unattended sensors. It is in our DNA. PIES and AMT are just two. Do you have a mission in mind? Get in touch with us and we will be happy to explore what is possible.
In the next instalment, I’ll take a look at what actually goes into making these sensors. Yes, it is as hard as you might think.