
A new world of multi-robot ocean exploration
The OECI’s Technology Integration Challenge made major strides in multi-robot operations, on the surface and underwater, unlocking ways to explore our ocean – and far more efficiently. Find out how and the role our acoustics played.
The challenge
Ocean exploration is costly. Operations involving single underwater platforms, such as remotely operated vehicles (ROVs) or autonomous underwater vehicles (AUVs), often take up an entire cruise. Even when multiple underwater robots can be accommodated on a vessel, only one tends to be deployed at any one time, due to the complexity involved in its deployment, operations and recovery. It makes ocean exploration expensive and limits how much science can be conducted on any one cruise. But what if uncrewed surface vessels (USVs) could be used, not just as force multipliers for mapping operations, but as a remote shepherd, coordinating multiple underwater vehicles, they would be able to operate entirely freely from a mother ship.
This was a key objective of the US’ Ocean Exploration Cooperative Institute (OECI) 2022 Technology Integration expedition NA139 on the Exploration Vessel (EV) Nautilus.
Enhancing ocean exploration through the use of remote and autonomous operations is a key objective of the OECI, a partnership between The University of Rhode Island, The Ocean Exploration Trust (OET), The University of Southern Mississippi, the University of New Hampshire (UNH), Woods Hole Oceanographic Institution (WHOI) and primary funding partner National Oceanic and Atmospheric Administration (NOAA) Ocean Exploration.
The expedition brought together OECI partner robots together with OET’s EV Nautilus for a ground-breaking technology demonstration in the Pacific Ocean during May 2022. These were:
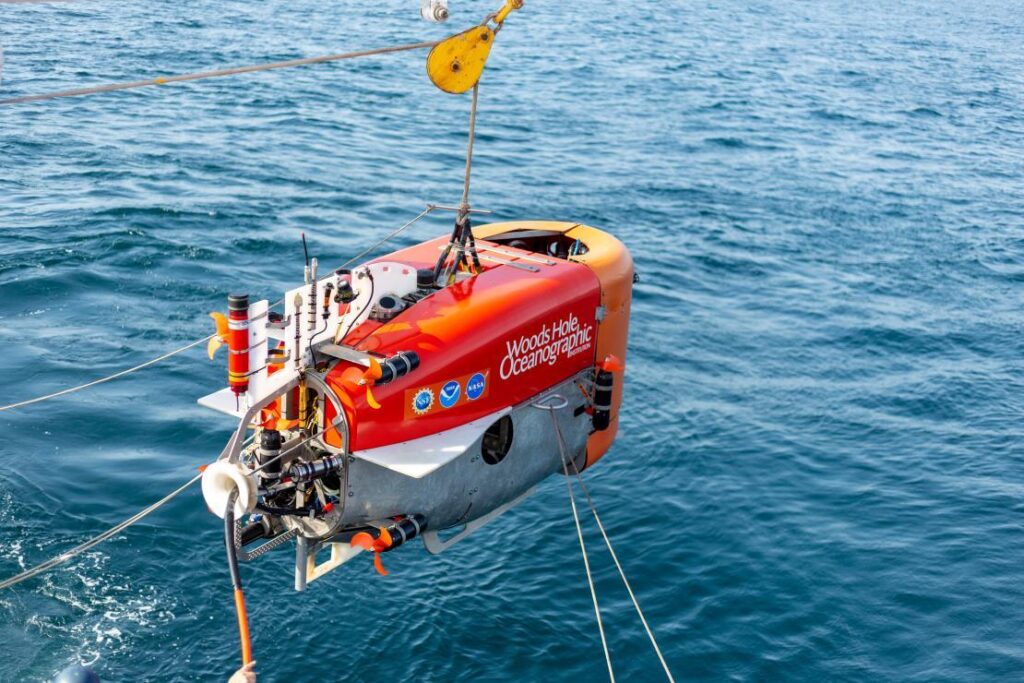
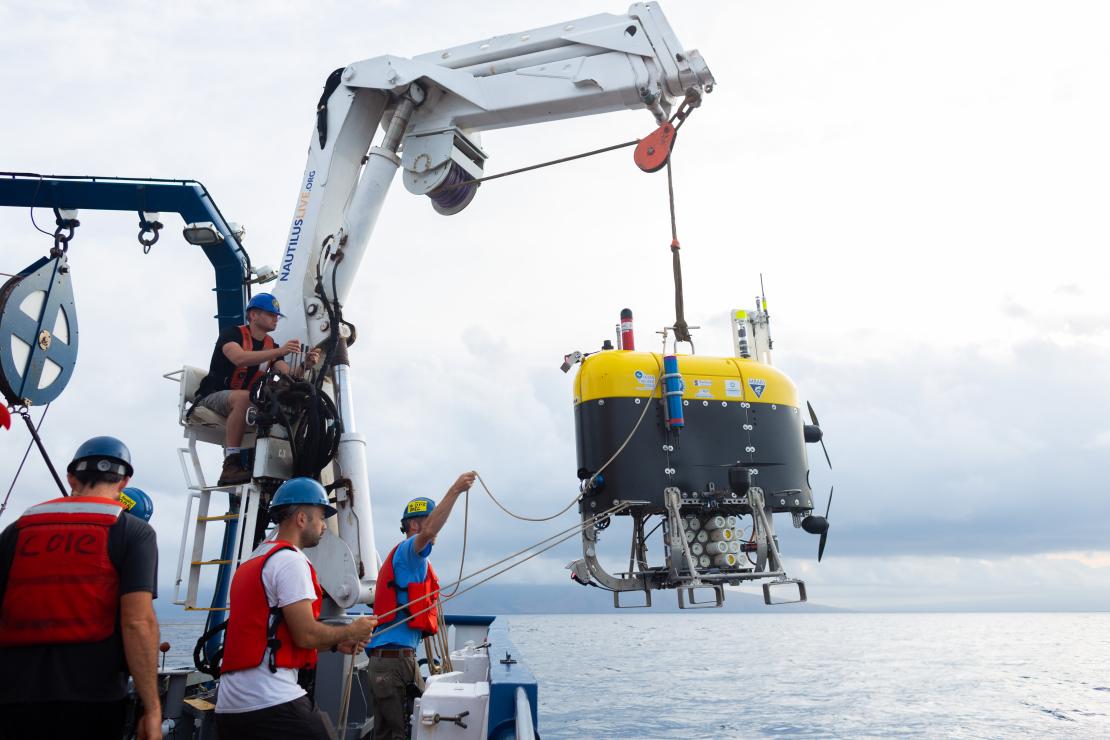
Mesbot – WHOI’s mid-water robot that is designed to image and sample plankton layers.
NUI – WHOI’s hybrid ROV-AUV, designed initially to work under ice, that can operate out to about 20km on a fibre optic cable for high data rate data, but can also continue to operate without the fibre link.
DriX – UNH’s 7 m-long USV capable of supporting a variety of payloads such as multibeam echo sounders, acoustic communications and tracking and surface communications.
Their goal was to have all three platforms operating together, sharing information and situational awareness and relaying their information, via the DriX, back to the EV Nautilus, enabling scientists onboard to remotely control subsurface operations up to 20 km away from the ship.
Key to meeting their goal was inter-vehicle communications, tracking and positioning.
The solution
The DriX used a marine broadband radio link to communicate with the RV Nautilus (and our HPT 3000) to track, position and communicate with (including providing navigation data) the Mesobot and NUI as part of our Mini-Ranger 2 Ultra-Short BaseLine USBL system.
The underwater vehicles Mesobot and NUI were fitted with our AvTrak 6 combined tracking, telemetry and control transponders. The EV Nautilus was also fitted with our Ranger 2 Gyro USBL system, which would have also be able to track, position and communicate with the Mesobot and NUI, if this had been required.
Mini-Ranger 2 is our mid-level USBL tracking system that’s also able to support communications with underwater vehicles. It can track up to 10 targets at a time, at ranges of up to 4,000 m (with an extended range option) and, with our Robotics Pack, enables command and control untethered underwater vehicles.
For the OECI team, it was this combination of communications and positioning – acomms and USBL – that offered the broadest possibilities to the mission, from a single system.
AvTrak 6 is our tracking, communications and relocation transceiver. It allows USBL aiding for your AUV from a surface vessel and robust telemetry for AUV to vessel and AUV-to-AUV communications.
Ranger 2’s Gyro USBL comes pre-calibrated, thanks to its perfectly aligned acoustic transceiver and built-in attitude and heading reference sensor (AHRS), so you don’t need to take the measurements otherwise needed to determine the alignment of the ship’s motion sensors to the acoustic transceiver.
This makes it a very a portable system that the OET can use on vessels of opportunity. On the EV Nautilus, it was fitted through the vessel’s moon pool.














0
robots
0
dives
Communications
0
km
range
The results
“This was a real first for us,” – Professor Larry Mayer, Director of the Center for Coastal and Ocean Mapping, University of New Hampshire.
Over the course of the 16-day expedition near the island of Oahu, off Hawaii, the team tested and demonstrated operational capabilities. Over 30 dives were performed, totaling 210 hours in the water.
The team established a common control system, based on the robot operating system (ROS) for the vehicles and then set out, each time proving out more and more capabilities.
First, they had DriX track and communicate with Mesobot, using Mini-Ranger 2. Because the DriX has GNSS data at the surface, this meant it could position the Mesobot in the real-world and relay this data back to the RV Nautilus.
Next, they sent commands, via the DriX to Mesobot, from EV Nautilus to open and close its samplers, as well as to move up or down or to the right or left as well as change speed through the water column.
But then the most exciting thing happened, explains Professor Mayer:
“Mesobot is designed to sample layers in the water column. But it doesn’t know where they are. DriX has a sonar (EK-80) that could see those layers. So we could get DriX sonar data back on the ship and in real-time see what’s called the scattering layer of plankton and command the Mesobot to go to that layer to sample it.
“Because Drix is circling above, it can actually see the Mesobot in the layer. This was a whole new world. Normally, Mesobot is sampling blindly. We could now direct it into the layer, know it’s in the layer and see if its entrance causes the layer to scatter. All these were unknowns before.”
The team were then able to repeat these activities with NUI, including using DriX to map the seafloor east of Maui and then relay a mission to NUI for further investigation. In addition, CTD data, as well as snippets of imagery and bathymetry were transmitted acoustically up to the DriX, using Mini-Ranger 2, and then via the radio link back to the Nautilus.
“By the end of the cruise we were able to have both vehicles in the water with the DriX circulating above, communicating with each of the vehicles, giving each other situational awareness, and the mothership, it was off do its own thing. I couldn’t have asked for a more successful cruise,” says Larry.
“We are really opening up a new world of multi-vehicle operations. In the old days, we would schedule a cruise and just use the Mesobot or schedule a cruise and just the NUI or an ROV. Even if they would all fit on one ship at the same time, you only use one at a time, so the $60,000 a day would be clicking away and you’re only doing a single science operation.
“Now we can do 2-3 science operations, the efficiencies are tremendous and it allows us to explore the seafloor, water column and surface all at once.
“The Mini-Ranger 2 system gave us the broadest base of possibilities with having both the acoustic communications and the positioning, USBL and acoustic communications, from the same system and that combined set of capabilities was so important to us.
“The standardization and ease at which we were able to send messages across from our programmers made it easy to use. The cooperativeness and responsiveness of the team at Sonardyne was also really helpful. They didn’t see it as disruption, they saw the possibilities.”
The expedition was funded by NOAA Ocean Exploration via the Ocean Exploration Cooperative Institute.
For more information and to watch other videos from Nautilus, click here.