As autonomous underwater vehicles (AUVs) achieve higher levels of autonomy, travel further and go deeper, it’s important that they maintain the ability to accurately determine their position, velocity and orientation without surface assistance. Navigating without any external aiding is the operating mode referred to as free-inertial. In this blog, we’ll explore the concept of free-inertial navigation for AUVs, the technology behind it and how Sonardyne’s SPRINT-Nav X enables vehicles to navigate unsupported for longer.
What do we mean by free-inertial navigation?
Free-inertial navigation refers to using an inertial measurement unit (IMU) to estimate position, velocity and orientation independently, without any other sensor measurements. In a subsea context, the inertial navigation system (INS) would normally function by fusing IMU data with velocity measurements from a Doppler velocity log (DVL) and position measurements from GPS on the surface, or acoustic positioning systems when submerged, to create an overall more accurate estimate of the vehicle’s state.
In free-inertial navigation the INS is only provided with IMU measurements; acceleration and angular rate, and so must accurately estimate the vehicles onward trajectory based solely on summing these measurements over time to calculate velocity and position. As such, free-inertial navigation performance is highly dependent on the quality of the IMU and navigation algorithms.
When do we need to rely on free-inertial navigation?
Free-inertial navigation is a common scenario subsea. GNSS signals are unable to penetrate water and, for AUV operations, acoustic positioning systems are limited by their operating range, the need for line-of-sight, and deployment costs. Additionally, for missions which include long transits, higher levels of autonomy or covert operations, acoustic positioning systems are impractical. The DVL is a very powerful sensor for subsea navigation but only generates velocity measurements when within ~300m range of the seabed. This gives two main scenarios where free-inertial navigation occurs:
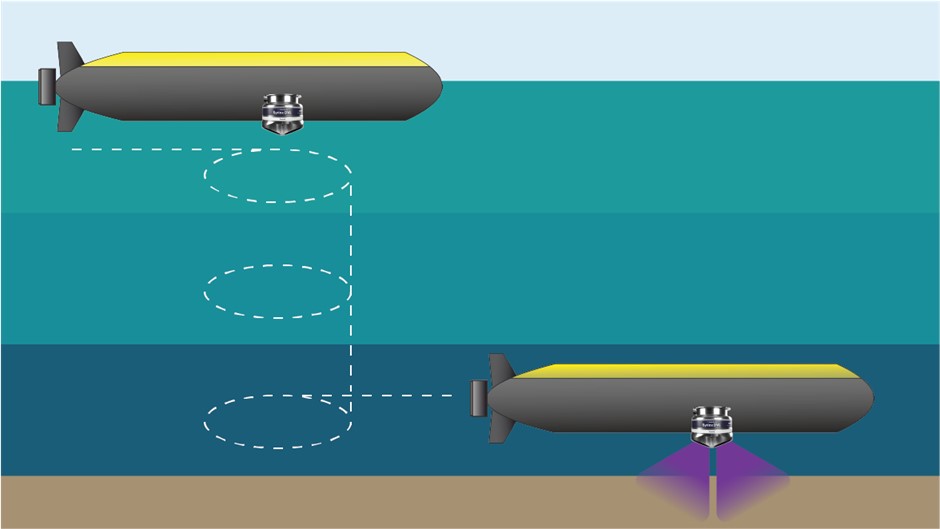
Diving – between the last GPS fix on the surface and diving down to within operating altitude of the DVL, an AUV would be unaided i.e. in free-inertial.
Mid-water column transit – AUVs wanting to travel longer distances submerged and out of DVL range.
How do we achieve good free inertial navigation?
For free-inertial navigation to work effectively the IMU must be highly precise. An IMU measures changes in acceleration and rotation via accelerometers and gyroscopes, but even very small errors in these measurements accumulate over time leading to large position errors. For applications requiring free inertial navigation with low power, compact sensors we look to high-performance fibre optic or ring laser gyroscopes which are both very accurate and stable. However, even with these advanced sensors there are still errors.
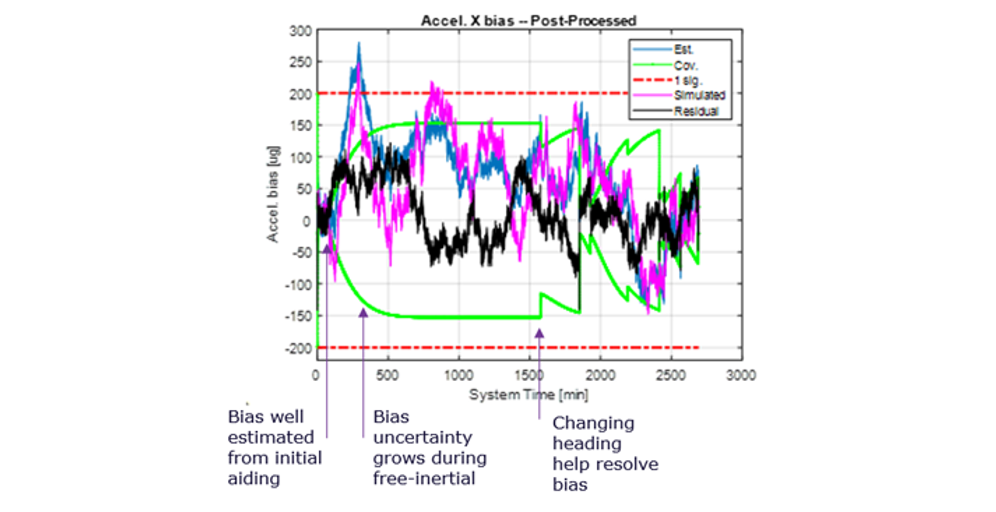
The most significant error term in high-end systems for free-inertial navigation is a bias—a false offset in sensor readings that, when continuously accumulated over time, will drastically reduce navigation accuracy. Fortunately, we can estimate and compensate for these biases when other sensor measurements are available to the system.
When provided with external position or velocity measurements from GPS or the DVL, the INS can observe, characterise and compensate for these errors in the IMU. For high-grade IMUs with very small biases it takes time, the right manoeuvres and good aiding data to properly estimate these.
What impacts free-inertial navigation performance?
Free-inertial navigation performance is influenced by various factors, including the behaviour of the IMU and external forces:
- IMU bias instability: Whilst IMU biases can be estimated and removed, they change over time and can be influenced by external factors such as temperature. Selecting IMUs with the best bias instability performance, particularly in the gyroscopes, is important for optimal free-inertial navigation.
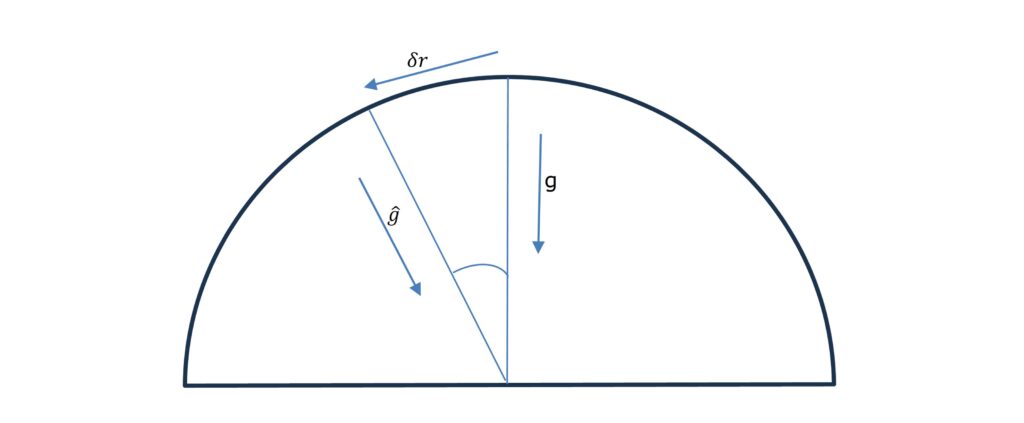
- Schuler Oscillation: An INS on the Earth with a position error along the surface will experience a false acceleration in the opposite direction to the position error because of the gravitational model. This negative feedback on the position error exhibits as an oscillation with a period of 84 minutes – Schuler Oscillation. This phenomenon is one reason why free-inertial position error growth is non-linear.
- Foucault Oscillation: Foucault Oscillation refers to the periodic drift observed in a free-inertial navigation system due to the Earth’s rotation and the Coriolis effect. In an inertial navigation system, the INS remains fixed in orientation relative to space, while the Earth rotates beneath it, causing a shift in position estimates that oscillates over a period relating to the latitude of the system.
Navigating with SPRINT-Nav X
The SPRINT-Nav X from Sonardyne is a proven solution for achieving accurate free-inertial navigation. As a combined Doppler-inertial navigation system, it integrates the highest performing ring-laser gyroscopes and accelerometers within an IMU, which is tightly coupled to the DVL. In free-inertial mode, the SPRINT-Nav X maintains exceptional accuracy, holding a position error of less than one nautical mile over an eight-hour period – a standout benchmark for its class in size, power consumption and cost.
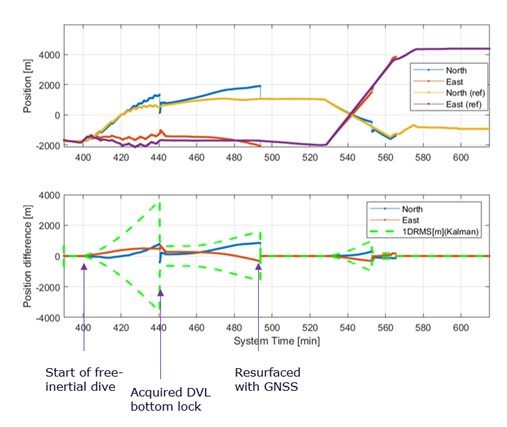
A key advantage of the SPRINT-Nav X is its tight integration between the IMU and DVL, which yields additional advantages when navigating within range of the seabed and when recovering from periods of free-inertia. The unit is factory calibrated for all alignment errors between the DVL at beam level and the IMU. This means that when DVL aiding is available, velocity corrections seamlessly propagate through the navigation algorithms and update the position accurately. During free-inertial dives, users will notice that while position error will gradually increase, it will reduce once the DVL detects the seabed and applies velocity corrections.
AUVs which are intended to complete long transits, wide-area surveys, or operate in water depths greater than the maximum DVL range will likely encounter sections of free-inertial navigation during their missions. As discussed above, there are multiple factors that impact how position errors occur and grow during free-inertial navigation. SPRINT-Nav X uses the highest-grade vs form-factor sensors, and navigation algorithms that accurately model these, to achieve robust free-inertial navigation performance. However, even with high-grade sensors, achieving optimal free-inertial performance depends on building the right operational procedures into your AUV missions.