Using a hammer to crack a nut? Try using a USV instead
USVs are no longer new. They’ve been used in defence for some time now, for a range of tasks from surveillance to mine counter measures. USVs are being used to survey coastal and offshore waters in hydrographic surveys, for ocean science and in oil and gas
The challenge
Crewed vessels used in offshore construction projects are costly and can even hinder progress. But it doesn’t have to be that way. Other sectors that operate in the marine space are now finding new, smaller, smarter, cleaner tools. They’ve been using uncrewed surface vessels (USVs), so the big, crewed vessels can stick to the jobs they’re good at.
So why are we not using them heavily in offshore construction?
One reason may be because offshore construction was in fact an early adopter. But, at the time, there were only a handful of commercial USV operators whose vehicles were just too big for what was needed, making them unwieldy to deploy from an offshore vessel, defeating the point of the exercise.
Another may be the worry of the complexity involved in offshore construction. Creating complex structures on shore is one thing. Creating them under metres of salt water is entirely another.
Then there is the issue of communication and control over the construction process. Making sure each step is taken exactly as planned is fundamental to the overall success of a construction project.




The solution
USV technology has come a long way since their inception. They’ve been used in defence for some time now, for a range of tasks from surveillance to mine countermeasures. USVs are being used to survey coastal and offshore waters in hydrographic surveys, for ocean science and in oil and gas. They’re being used to go out and gather data, either as a platform for oceanographic instruments or by carrying acoustic communications systems to harvest data from sensors deployed at the seabed. You could think of them being like a remote-controlled Dunker.
USVs are now part of the toolbox across a number of sectors and the levels of sophistication and capability are increasing. Worries about lack of control, the complexity of operations or large clunky kit that isn’t up to the delicate tasks required in offshore construction are today unfounded.
In offshore renewables and oil and gas USVs are being used as part of site and seismic surveys, and then through field life, for inspection operations. They’re also being used for maintenance and repair, by acting as deployment platforms for autonomous underwater vehicles (AUVs), remotely operated vehicles (ROVs) and even aerial drones (UAVs).
The results
Today there’s a wide choice of USVs to choose from. From one-man portable USVs to full sized vessels, and on to fully electric coastal systems and hybrid long-range ocean-going vehicles that can operate for weeks on end. The range of commercial models has also grown. You can buy them outright or purchase a data service where you just order the end result – be it data or an inspection campaign.
USVs can now play a central role in construction operations. They can streamline operations and reduce risk for manned offshore construction teams. When deployed they reduce reliance on heavier, costlier tools and free-up crewed assets to be used on elements of a project where they’ll bring more value.
How to optimise carbon storage monitoring with marine robotics
For a long time, while carbon capture and storage (CCS) in offshore underground reservoirs had been widely regarded as a major way to reduce carbon emissions, it failed to attract the up-front investment needed to make it work. That’s now changing.
The challenge
In today’s far more climate conscious world, sentiment and interest in CCS has very much changed. Significant projects are now being planned. Projects are moving forward in Norway, Netherlands and the UK. Carbon storage licenses are being awarded and wells are being drilled specifically for carbon capture and storage.
Since 1996, CCS projects have been relatively small, yet their potential is vast. On the UK Continental Shelf alone there’s at least 78 gigatonnes of CO2 potential storage capacity – some 200 times the UK’s 2016 emissions*.
From capture to transport by pipeline and injection into a suitable geological formation offshore, there’s a lot to process. But the challenges do not end there. What happens to the CO2 once injected? How will we know if it finds a leak path to the surface?
To answer these challenges and achieve the visions that operators from Equinor in Norway to BP in the UK are promoting, increased capability for marine robotics is required.








The solution
Thanks to the Energy Technologies Institute (ETI) funded three-year research programme back in 2014, this challenge for increased capability of marine robotics has been attained. The project was delivered by a consortium of experienced companies including Fugro, National Oceanography Centre (NOC), British Geological Survey (BGS), Plymouth Marine Laboratory (PML) and ourselves, Sonardyne.
Along with increasing the capability of marine robotics for successful CO2 storage, four key technology elements for large carbon storage and monitoring projects were identified.
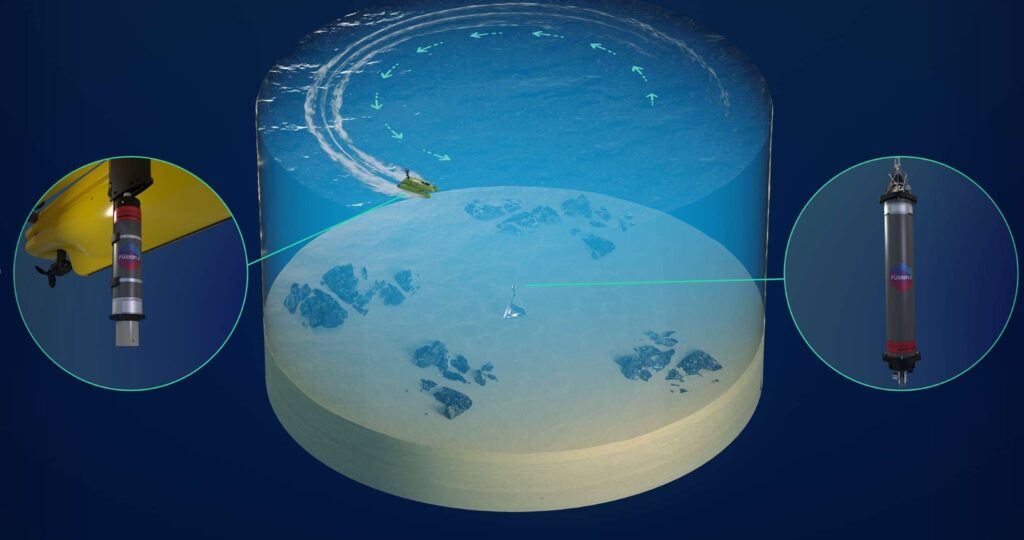
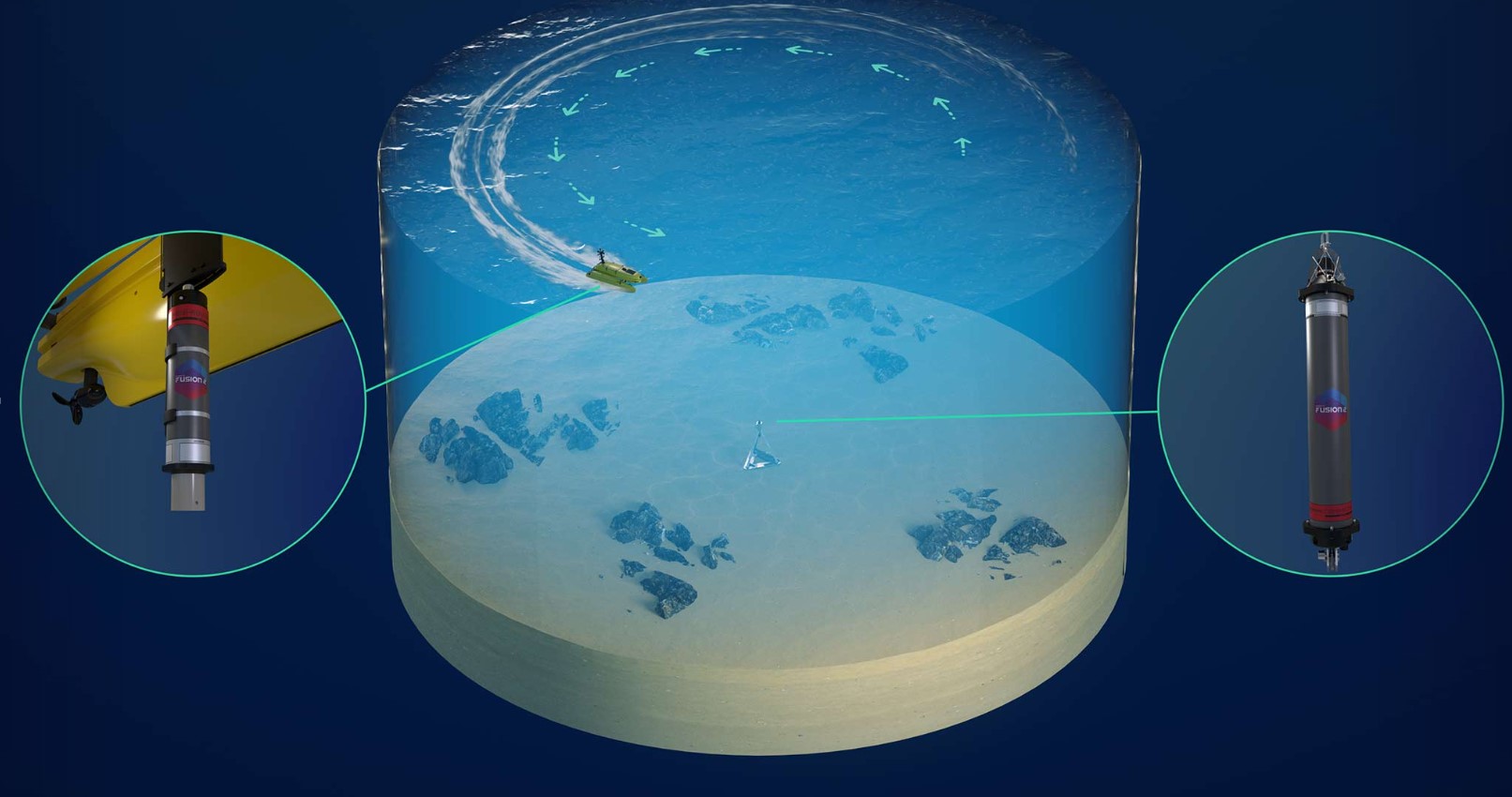
The first is a low-power and hence long-endurance autonomous underwater vehicle (AUV). This is required for cost-effective wide-area coverage surveys during baseline and repeat environmental surveys. We found using a combination of our Solstice side scan sonar and chemical sensing worked extremely well.
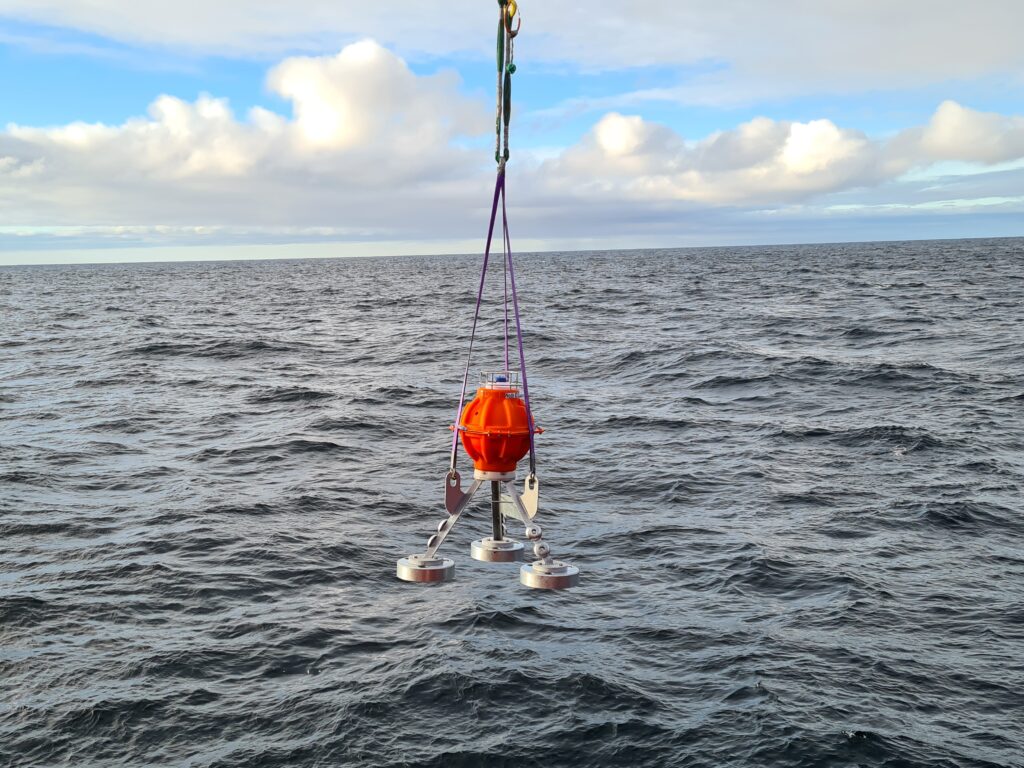
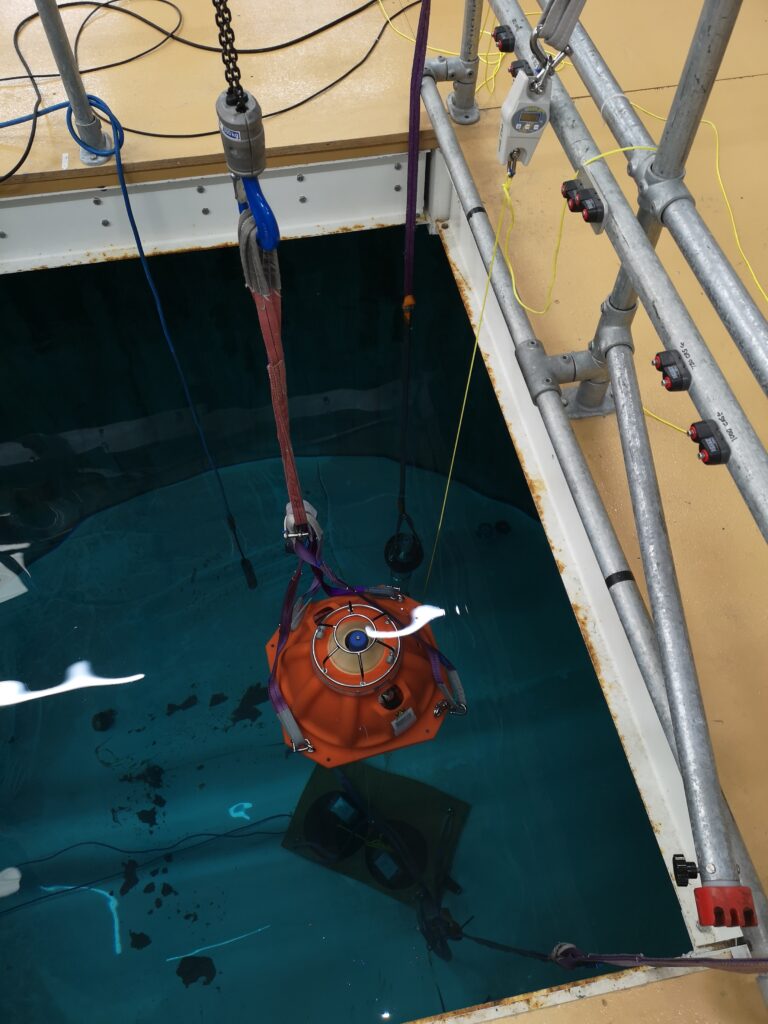
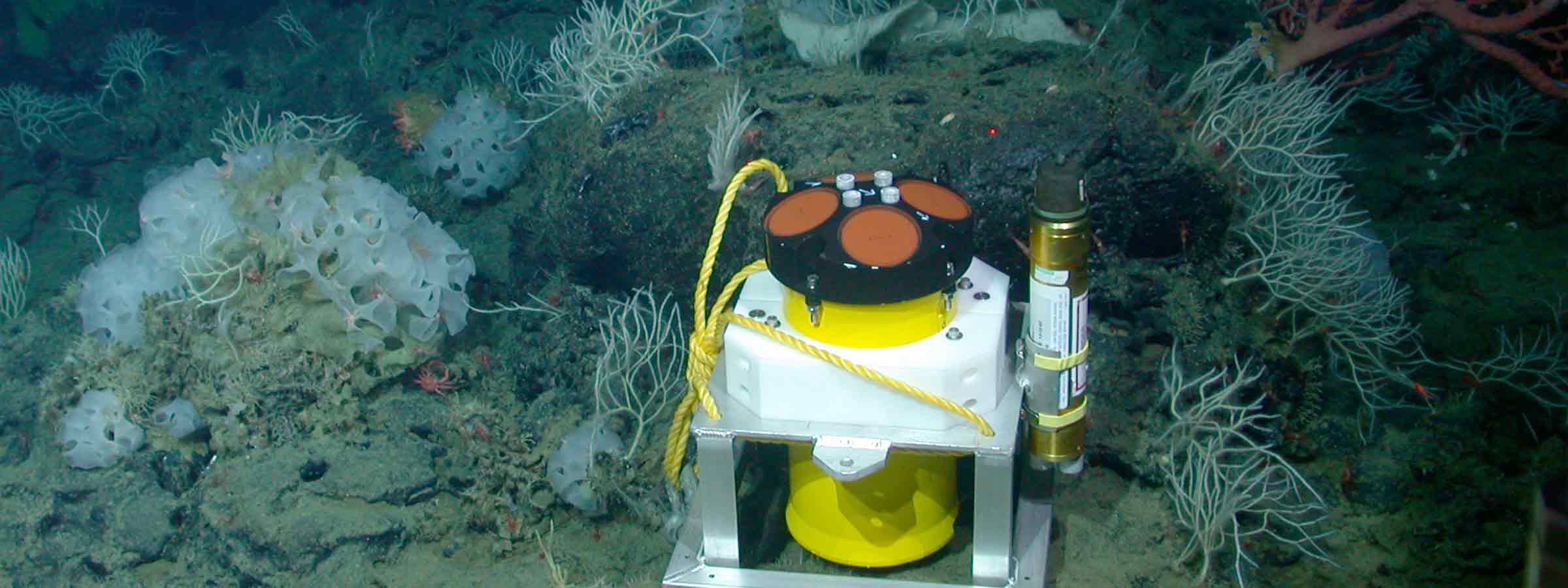
Second and third elements are seabed landers capable of detecting and monitoring any leakage at high-risk locations. These consist of two different landers, one using an active sonar and the second combining passive sonar and chemical sensing.
The active sonar lander, based on our Sentry integrity monitoring system (IMS), gives sensitive and reliable automated leak detection capability across a wide area. For instance, around an injection well, Sentry can monitor an area of over 2.3 million square metres, to help visualise that’s equivalent to around 325 football pitches. The passive sonar and chemical lander, uses the smarts from our underwater acoustics capabilities. It’s capable of both detection of leaks, but offers improved verification and has the potential to estimate leak rates at shorter ranges.
The fourth and final element is a surface gateway to enable communication between a shore-based monitoring office and the underwater systems. Such a gateway can be deployed from a fixed platform, from a moored buoy or from an uncrewed surface vessel (USV), many variants of which are now readily available in the market for over-the-horizon data harvesting missions.
We have a range of payloads suited specifically for use on operator’s USVs for their requirements. We also offer our own end-to-end data-harvesting service, when you just want the data without the worry about the interfaces involved in getting it.
Our system of systems approach to CCS was tested on the ETI project. Wideband acoustic communications between the underwater landers and a buoy on the surface was used to forward all data via satellite communications to a server. This type of set-up is well-proven and used globally on tsunami monitoring systems. Display and interpretation of the monitoring data can be simply integrated into a third-party system to allow non-expert users access via a web portal. From here they can see data visualizations and run reports.
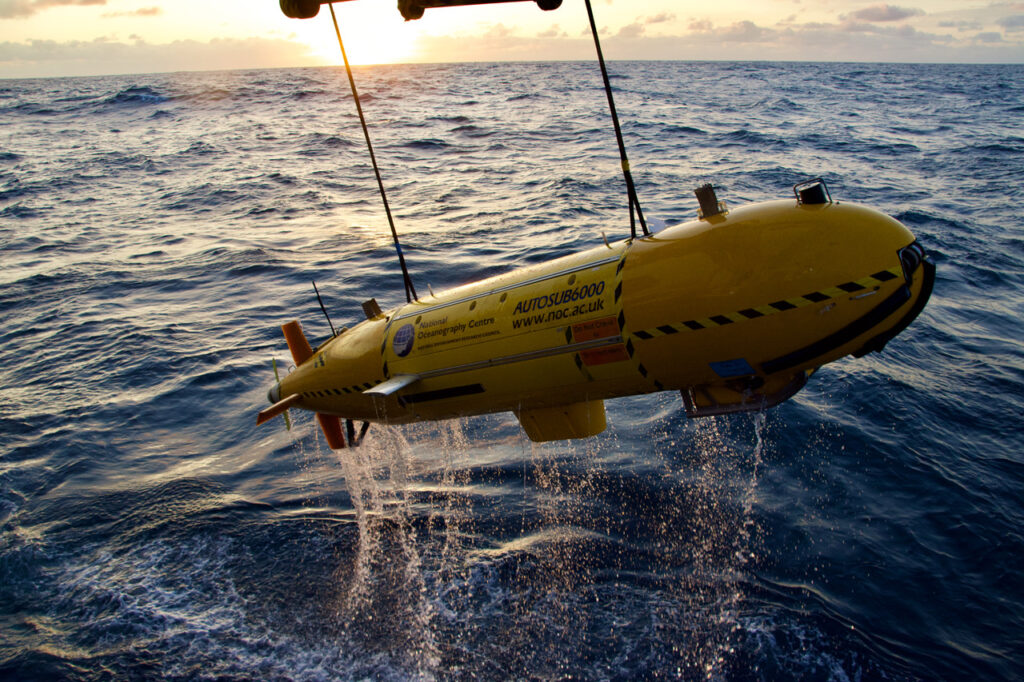
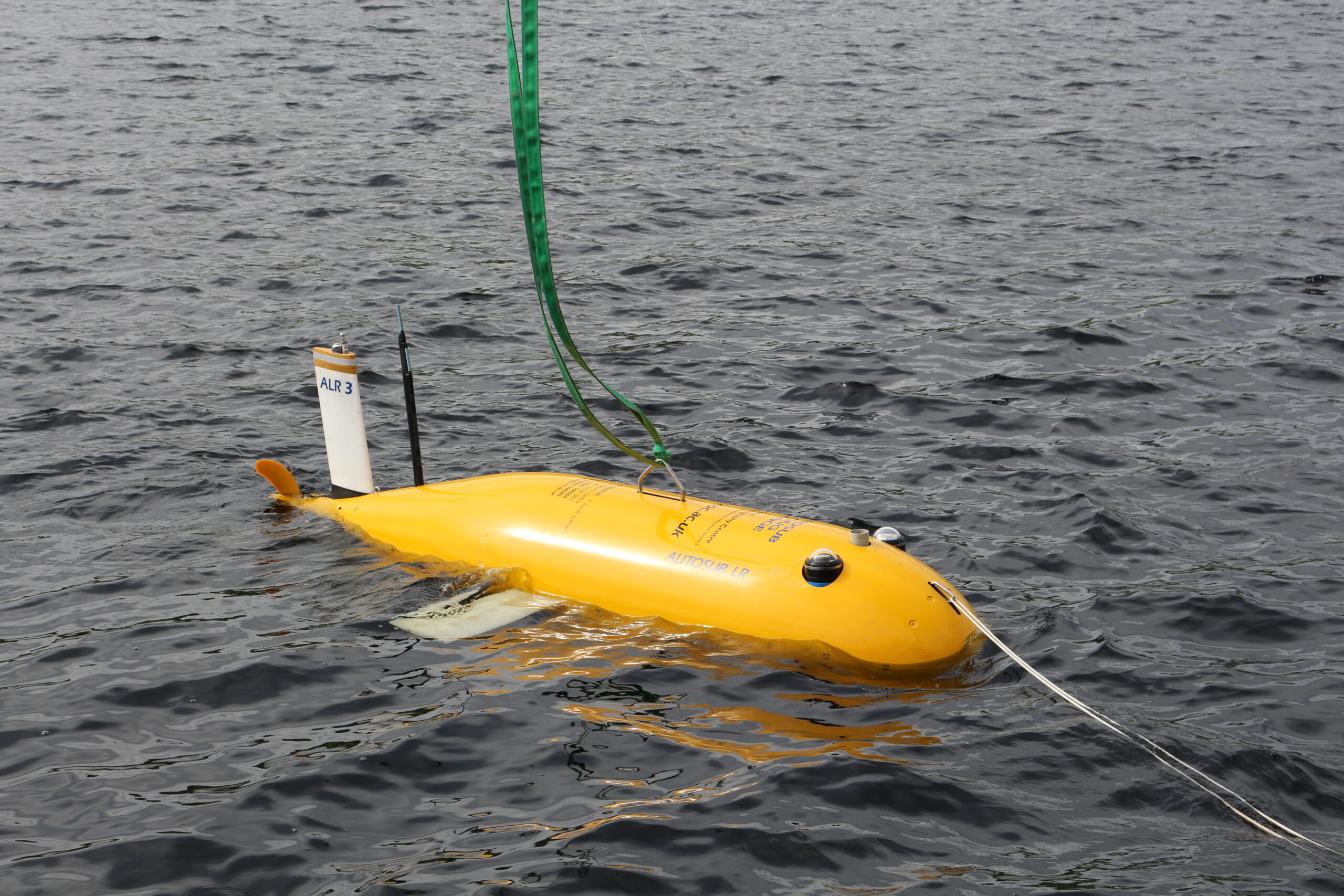
The leak target was deployed in the North Sea, east of Bridlington. The NOC’s Autosub Long Range (ALR) was deployed from the small port at Bridlington and towed a short distance off the coast. After the ALR performed a series of tests to demonstrate safe navigation, the leak – a small CO2 leak – was turned ‘on’ with a flow rate of between 16 and 20 litres per minute of gas at depth, depending on the state of the tide.
With the leak “on”, ALR performed a series of different wide-area and fine-area search patterns over five days to seek out the leak. The sensor hub on the vehicle processed in real-time a complex set of Solstice sonar, physical and chemical sensor data, into useful information.
Automatic target recognition algorithms were used to identify any leaks or regions of interest. The system then scored these regions of interest and saved a small “snippet” of the sonar image data. At regular intervals throughout the survey, ALR would surface and send back data via satellite, including navigation data, chemical and physical sensor data and details of snippets of sonar data from detected leaks – an example of which can be seen below.
All of the uploaded data was simultaneously transferred to an internet server which allowed for presentation and interpretation using Fugro’s Metis software. This is an intuitive data delivery platform that allows metocean, vehicle navigation, chemical and sonar snippet data to be combined and displayed. This allowed data sharing across a wide team and supported operational decision making.
During the five days of testing, the ALR travelled a total of 270 km and could have surveyed 54 sq km of seabed in normal operation. However, for the purposes of the demonstration, a total of 16.1 sq km was actually surveyed. Throughout its mission, the ALR was remotely controlled from the shore, mostly from the NOC’s control room in Southampton.
The results
The ETI project consortium demonstrated a functional “system of systems” which can provide operators of offshore CO2 storage sites with a high level of confidence in their safe operation and assist in the provision of regulatory compliance.
We’ve proven it is possible to conduct shore-to-field-to-shore environmental survey operations using a long-endurance AUV. We’ve also shown it’s more than possible to operate well in excess of normal AUV deployments.
This method of working makes it possible to rely on a small local deployment team for CCS projects. The small team can then be supported by remote shore-based operations and a data interpretation team. This cuts both the time and cost of CCS operations considerably.
It is also entirely possible, and has been demonstrated elsewhere, that a further reduction of human decision making can be achieved to reduce operator intervention.
The ETI project demonstrated that it is possible to build highly cost-effective and autonomous sensing systems with on-board intelligence. These systems are both simple to deploy and operate and are very cost competitive with vessel-based or vessel supported AUV survey operations.
The project members have also developed two flexible seabed lander packages capable of extended duration deployments of six months to a year. These can provide localised and still also wide-area monitoring, automated processing of data subsea and communication of that information to surface.
Looking beyond carbon capture, the potential applications of such integrated marine robotic and intelligent remote sensing technologies are many and varied across ocean science, renewables, security and naval domains.
Unlocking the Gulf Loop Current
The Gulf of Mexico is home to one of the world’s most energetic oceanographic phenomena – the Gulf of Mexico Loop Current. Reaching intensities of between 2 – 4 knots and measurable down to 1,000 m, the Loop Current System (LCS) also regularly sheds Loop Current Eddies (LCE).
The challenge
LCEs are highly energetic anticyclonic (clockwise) rotating rings of warm water, roughly 300 km across and 500 – 1,000 m deep, with current speeds of up to 4 knots. These break away from the extended Loop Current about every 8-9 months and slowly drift west-southwestward towards Texas or Mexico at about 3-5 km per day.
When an LCE forms at the height of hurricane season, it has the potential to fuel rapid intensification of hurricanes. This is what happened in 2005, just before Hurricane Katrina passed over and “bombed” into a Category 5 hurricane.
Warm circulating eddies can break off the LCS into the western, northern and central Gulf. These eddies are so highly energetic that they regularly disrupt oil and gas operations. But, they’re also critical to the Gulf of Mexico’s oceanographic system, including its nutrient and food cycles and, most importantly, hurricane intensity.
Despite 50 years of effort by the scientific community to understand the processes underlying the LCS, its behaviour remains unpredictable. To some extent, this is because of interactions with the deep eddies, which have been difficult to track from measurements near the sea surface. For this reason, a multi-year scientific study has been launched, led by the University of Rhode Island(URI). It includes a major deployment of Sonardyne’s Pressure Inverted Echo Sounders(PIES).






The solution
Following a recommendation by the US National Academies of Sciences, Engineering, and Medicine a long-term, US$ multi-million research program to plug the gaps in understanding and predicting the LCS is now underway.
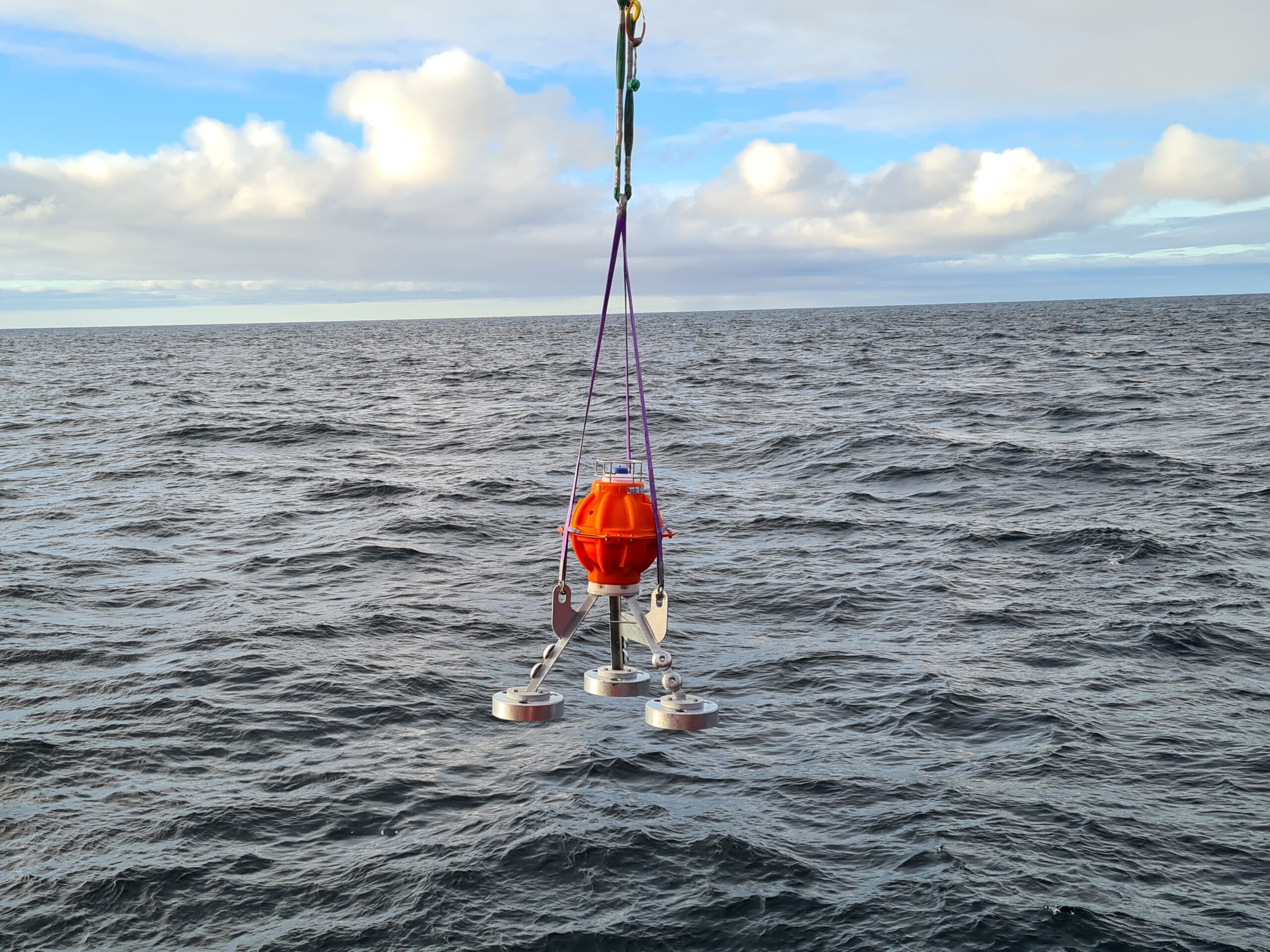
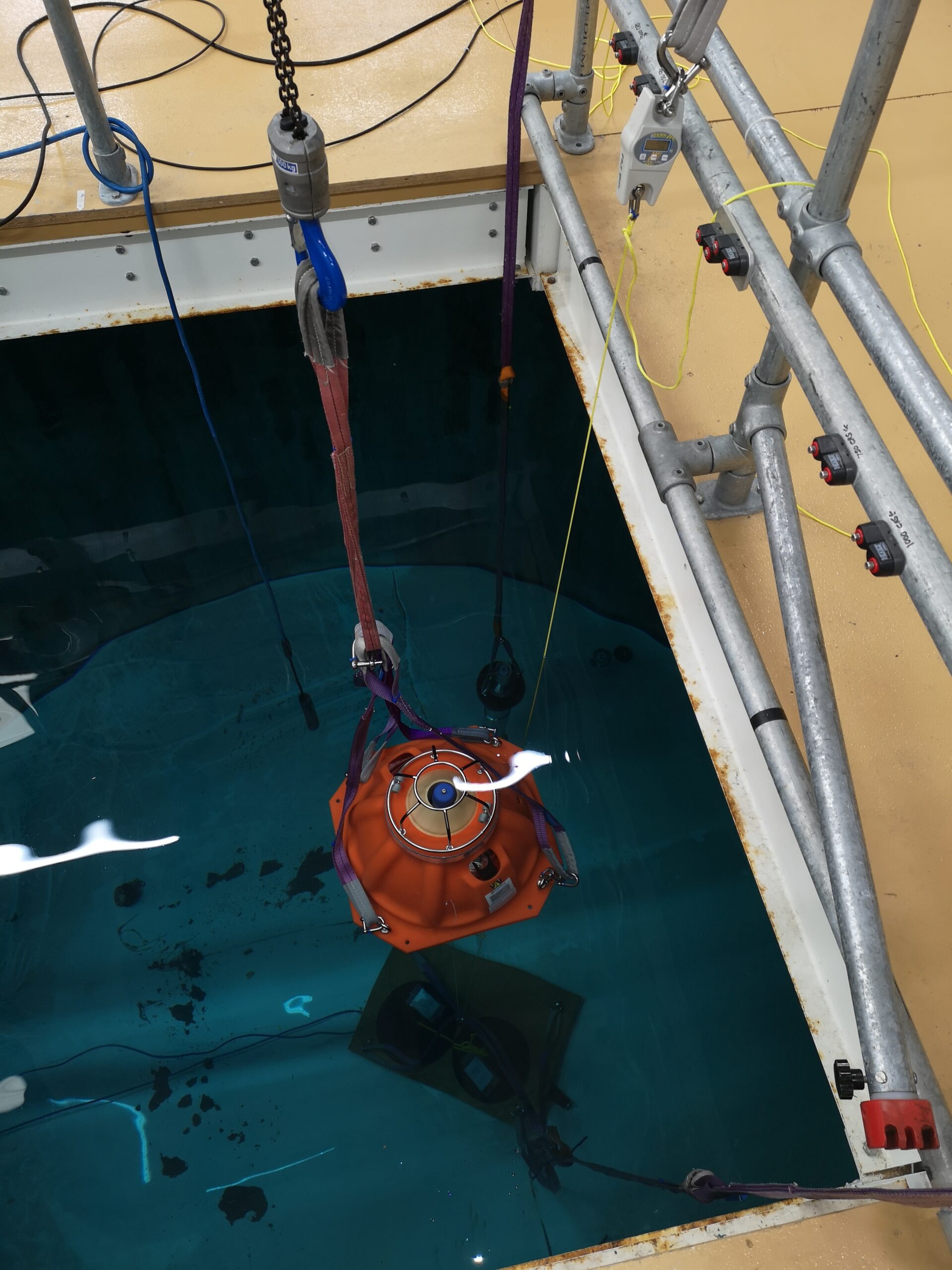
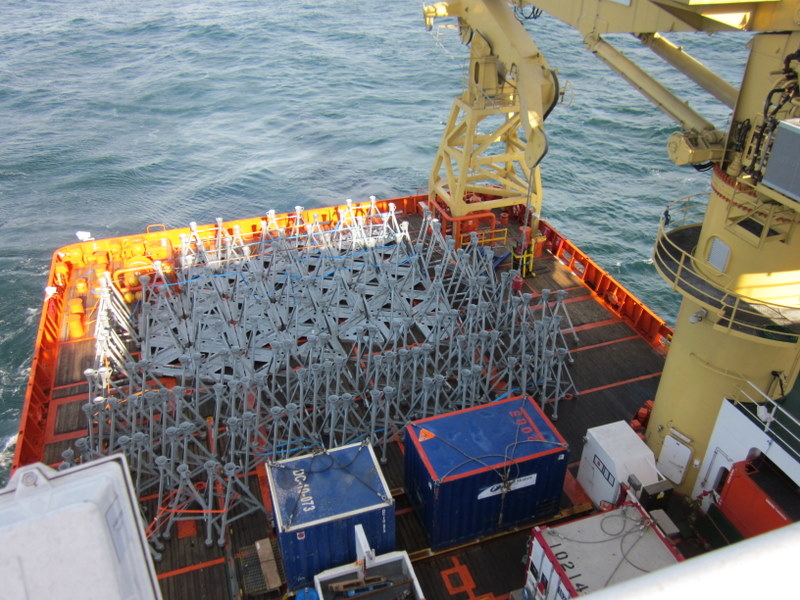
The initial two-year project comprises an array of 15 URI CPIES, five Sonardyne CPIES and five Bureau of Ocean Management PIES. These are in an array, spaced 60 km apart, at depths down to 3,500 m in the area of the extended LCS. Initially deployed in June 2018, for a nominal two-year study, the units are fitted with batteries that can keep them powered for up to 36 months. This will allow for data gathering continuity in the event of a subsequent expansion of the program.
A core element of this scientific study is the array of seabed-mounted sensors, including Sonardyne’s PIES. PIES were originally developed for the marine seismic industry to measure average sound velocity in the water column. They do this by transmitting a wideband acoustic pulse from their position on the seabed. This pulse is reflected off the sea surface and returns to the seabed where it is detected by the PIES.
Oceanographers, however, use PIES differently. Their goal is to derive important physical data, including the strength and direction of currents. This is based on the principle that there’s a strong correlation between two-way travel time (usually known as tau) and vertical profiles of temperature, salinity and density. As a consequence, where this profile has been derived from historical data, an empirical relationship can be derived, which enables the density profile to be inferred from tau.
At a basic level, a laterally separated pair of PIES will, therefore, provide a vertical profile of velocity, and by deploying an array of PIES, local horizontal velocity and density fields can be mapped over the period of deployment.
URI has pioneered and refined the use of PIES for this purpose. While URI has a long history of developing its own PIES instruments, it decided to use Sonardyne’s PIES, as well as its own. This was primarily because a comparison study off the coast of Oregon* indicated that the Sonardyne PIES could generate similar accuracy data efficiently, potentially enabling longer deployments – and because of their telemetry capability.
Sonardyne’s integrated high-speed (up to 9,000 bps) acoustic telemetry capability also enables remote reconfiguration of the instruments and wireless retrieval of data to surface vessels, without interrupting the bottom pressure record.
These capabilities are based on Sonardyne’s extensive expertise in underwater acoustics, signal processing, hardware design and custom engineering, which URI recognises, have the potential to reinforce future PIES development.
Sonardyne’s expertise was central to reconfiguring a standard PIES as a CPIES (Current PIES) which was needed for this project to allow for near-seabed current data to be harvested alongside the PIES pressure and tau measurements. It also delivers important data on deep eddy currents above the seabed/water interface.
The reconfiguration involved connecting an Aanderaa Doppler current sensor to the PIES, which then served as a battery pack and data logger for the current sensor, deployed 50 m above the PIES on a float. Combining the deep current observations with the deep pressure observations enable data from the array to be referred to a common reference surface.
The results
An interim data retrieval campaign, using acoustic telemetry, was successfully completed in September. While the principal purpose of this was to recover an initial three-month-long data set, one notable feature found in the data was echoes, thought to be from fish, shrimp or squid.
This has been seen in other studies carried out by URI. We believe it is related to the transport of nutrients by deep currents crossing from the deeper to shallower thermocline side around the periphery of the Loop Current or a passing LCE.
The present array will inform planning for a longer-term, 10-year campaign. This could see a substantially expanded array of PIES deployed into Cuban, as well as Mexican and US waters. The aim of this larger array would be to provide near real-time data as input for LCS forecasting models.
Loop Current and LCE forecasts have the potential to benefit a wide range of users, from oil and gas operations and hurricane forecasters to fishing and tourism. Furthermore, improving ocean modelling in the Gulf of Mexico has the potential to provide a standard for improving prediction efforts in other ocean basins also.
Long endurance monitoring of tectonic motion
Subduction zones are tectonic plate collision boundaries where typically higher density oceanic crust is being pushed under continental crust. This is one of the most important processes in the evolution of the Earth’s morphology.
The challenge
Subduction zones comprise extremely large thrust faults, known as megathrusts, and are the source of the world’s most dangerous volcanoes and earthquakes. In between larger earthquakes, megathrusts comprise complex heterogeneous distributions of locking and therefore strain accumulation.
On land, GPS and laser observations enable precise geodetic measurements. Until recently, the inability to undertake cost-effective complementary observations subsea in the outermost subduction zone offshore, has been a critical flaw. This is where much of the elastic strain build-up and release occurs. Improving scientific understanding of the seafloor movement in these regions is an important basis for future seismic hazard assessment.






The solution
In response to this challenge, Sonardyne has worked with a number of research institutes, including GEOMAR, to supply networks of Autonomous Monitoring Transponders (AMTs ) – seabed instruments that are capable of taking hundreds of thousands of stable, highly precise geodetic observations, safely log the data and on command, wirelessly transmit it up to the surface.
Originally developed for the offshore industry to precisely measure vertical and horizontal seabed displacements caused by reservoir depletion, AMT is a long-life (up to five years depending configuration), deep-rated acoustic instrument fitted with high resolution pressure, sound velocity and temperature sensors. All of this is built around our 6G hardware platform and Wideband 2 digital signal technology.
AMTs run a fully automated logging regime gathering acoustic travel time (range) between neighbouring units, pressure, sound velocity, temperature and tilt data at intervals defined by the user. A passing AUV, vessel of opportunity, gateway buoy or unmanned surface platform can harvest data on demand and at any point, the user may amend the logging regime of any or all of the AMTs, using the bi-directional communications link.
GEOMAR have now deployed three AMT seabed arrays in Chilean seas. The largest array is the Geodetic Earthquake Observatory on the SEAfloor (GeoSEA) project, offshore northern Chile on the Nazca-South American plate boundary.
The last rupture resulting in a major earthquake at the array location was in 1877. This was identified as a seismic gap prior to the 2014 Iquique/ Pisagua 8.1 magnitude earthquake.
Nevertheless, the southern portion of the segment remains unbroken by recent earthquake activity and so, with the two plates converging at a rate of around 65 millimetres per year, new tension is being continuously built up. ‘Therefore the region is a focus site for seismologists to understand strain build-up prior to an earthquake,” says Professor Kopp
The GeoSEA array consists of 23 AMTs deployed from the German Research Vessel Sonne in late 2015 and comprises three sub-arrays that monitor different sections of the megathrust. The tectonic nature of the seabed gives rise to a variety of complex topographies.
Sonardyne’s in-house Survey Support Group worked closely with scientists from GEOMAR to plan the subarray layouts. Positioning of the AMTs were based on multibeam data collected during the preceding research leg. Precise placement in the order of a few tens of metres was required and in one case, an AMT had to be sited on a ledge on the side of a ridge that was only 50 metres wide and 150 metres long.
The first area is located on the middle continental slope between the main trench and the Chile coast and consists of eight transponders laid in pairs on a stairway-like feature of four topographic ridges at a depth of around 2,800 metres. The ridges, which are surface expressions of faults at depth, are approximately 100 metres high with around an 800 metre flat area between.
On the opposite (seaward) side of the trench from Chile, a further five AMTs were deployed in depths approaching 4,100 metres to monitor extension across plate bending related normal faults. Here, faulting of the Nazca Plate is caused by stretching of its surface as it is pushed downwards under the South American plate, and thus the fault lines are relatively new and active. The AMTs were laid at the intersection of multiple fault lines separating three or four blocks, with two being placed on the same block to provide a sound speed reference baseline.
The deepest area, located between 5,100 and 5,400 metres deep, is on the lower continental slope and comprises a circular pattern of eight AMTs surrounding two central instruments. This pattern provides a variety of short and long baselines to measure diffuse strain build-up in a highly faulted area made up of separate geological blocks, which are under high compression.
To cope with these extreme conditions, the AMTs used for the GeoSEA project are 6,000 metre-rated Lower Medium Frequency (LMF 14-19 kHz) omnidirectional units. Sampling at rates between one and a half and three hours, the GeoSEA AMTs are planned for an initial three and a half year deployment. However, the four metre high seabed frame in which each unit sits enables it to be easily removed by ROV, returned to the surface to allow its battery to be exchanged then placed back in the frame in the same position – giving scientists the option of extending the survey if required.
The results
Since initial deployment, data from the array has been recovered by a US research ship using a Sonardyne HPT 7000 dunking modem deployed over the side, as well as GEOMAR’s GeoSURF Wave Glider, equipped with a 6G acoustic communication module fitted in its hull.
“Overall, our experience with Sonardynes instruments is superb and our results have been beyond our expectations. It has been a pleasure for us to work with infrastructure that we can fully rely on.” Professor Kopp from GEOMAR commented.
The success of the AMT’s performance in the Nazca-South American plate boundary arrays has resulted in two smaller arrays in the Sea of Marmara off Turkey and on the submerged flanks of Mount Etna. Although the results of these surveys were yet to be published at the time of writing, scientists were excited by the new opportunities Sonardyne’s technology offers.
GEOMAR’s Doctor Dietrich Lange summarises that, “With this approach, we are taking a new path in earthquake research since previously, measurements of a few millimetres, were hardly possible.”
Seismic operations in the transition zone
When seismic operations move into very shallow waters, accurately positioning seismic nodes or ocean bottom cables (OBC) on the seafloor can pose a challenge.
The challenge
The transition zone environment is often highly reverberant, the vessels used are often noisy and they can be a considerable distance from the acoustic transponders used to position the nodes. What’s more, shallow water makes nodes especially prone to movement, adding a further complication to proceedings.
Repeated node positioning operations conducted from vessels are costly and time consuming. Noisy environments can inhibit the quality of information and manned vessels are a costly option for completing work that can be done remotely.




The solution
To solve these issues, Sonardyne has created our TZ Transceiver. It’s very compact and simple to operate. Ideally suited to installation on manned workboats and USVs, it’s already being used for conducting acoustic positioning operations with seismic nodes deployed in the transition zone.
The TZ Transceiver works by collecting hundreds of acoustic ranges from transponders such as our TZ/OBC, TZ Transponder and Small Seismic Transponder 6. These are often attached either directly to the seismic node or to a deployment rope nearby. The ranges are merged with the vessel or USV’s GNSS data so that an accurate position of each node can be calculated.
Mounting our TZ Transceiver onto a USV is ideal because it can follow the mother vessel autonomously and position the nodes as they are being deployed. Alternatively, it can be tasked to perform a position verification check to ensure the nodes have not moved.
The results
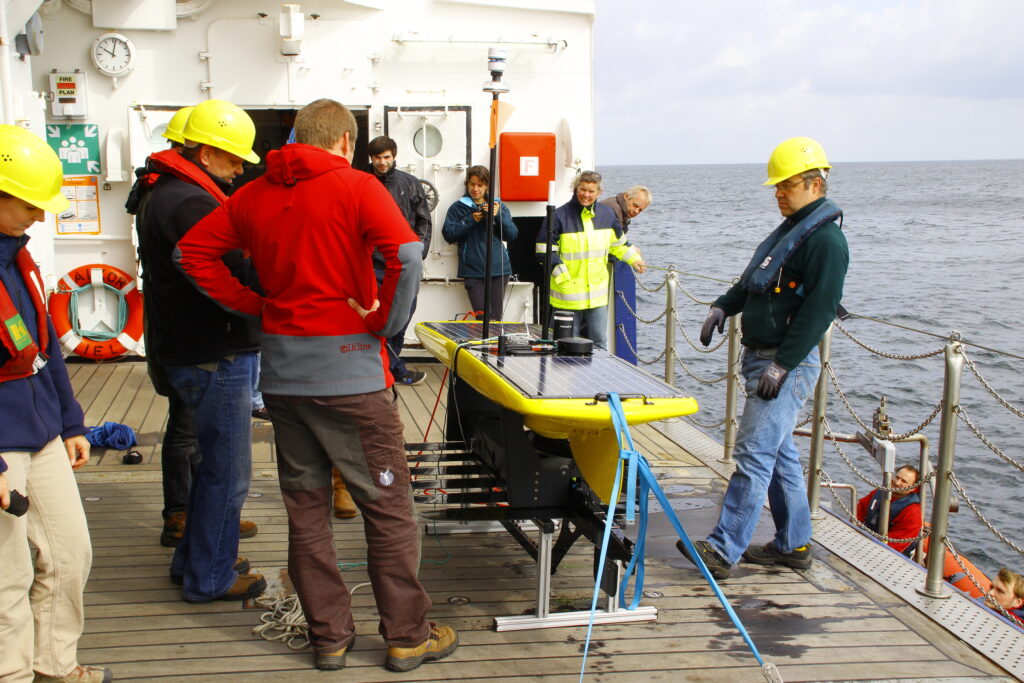
Fitting a TZ Transceiver to a USV such as the installation on Maritime Robotics’ Mariner USV is a very cost-effective force multiplier. The addition of the transceiver eliminates the need for a manned vessel to conduct the same routine operations.
Weighing in at 1,900 kg, Mariner is 6 m-long, 2 m-wide. It includes a moon-pool and an elevator mechanism for sinking and lowering sensors, such as our TZ Transceiver.
The vehicle is designed for both offshore and coastal applications and can be deployed and operated from a larger manned vessel or even over the horizon from a shoreside office. This increases the productivity of the existing survey crew as well as the overall profitability of seismic operations.
GPR – Acoustics unlock a new approach to seabed geodetics
Autonomous and uncrewed marine platforms are transforming the way in which we acquire and analyse data from our oceans. Our technology is assisting with seafloor geodesy, an emerging scientific field that is making the real-time study of continental plate tectonics a cost-effective and viable option.
The challenge
Seafloor geodesy projects are underway across the globe, all in pursuit of a better understanding of earthquakes, tectonic processes and tsunami hazards, and ultimately to save lives. In addition, the technology is being applied within the offshore oil and gas industry to mitigate risk through better ongoing surveillance during the producing life of a field.
But tracking seafloor and oilfield infrastructure movement at minute scale resolution through two miles of seawater is far easier said than done. Delivering the results straight to an analyst’s desk anywhere in the world takes a little more know-how than the GPS and laser methods we are used to seeing on terrafirma.
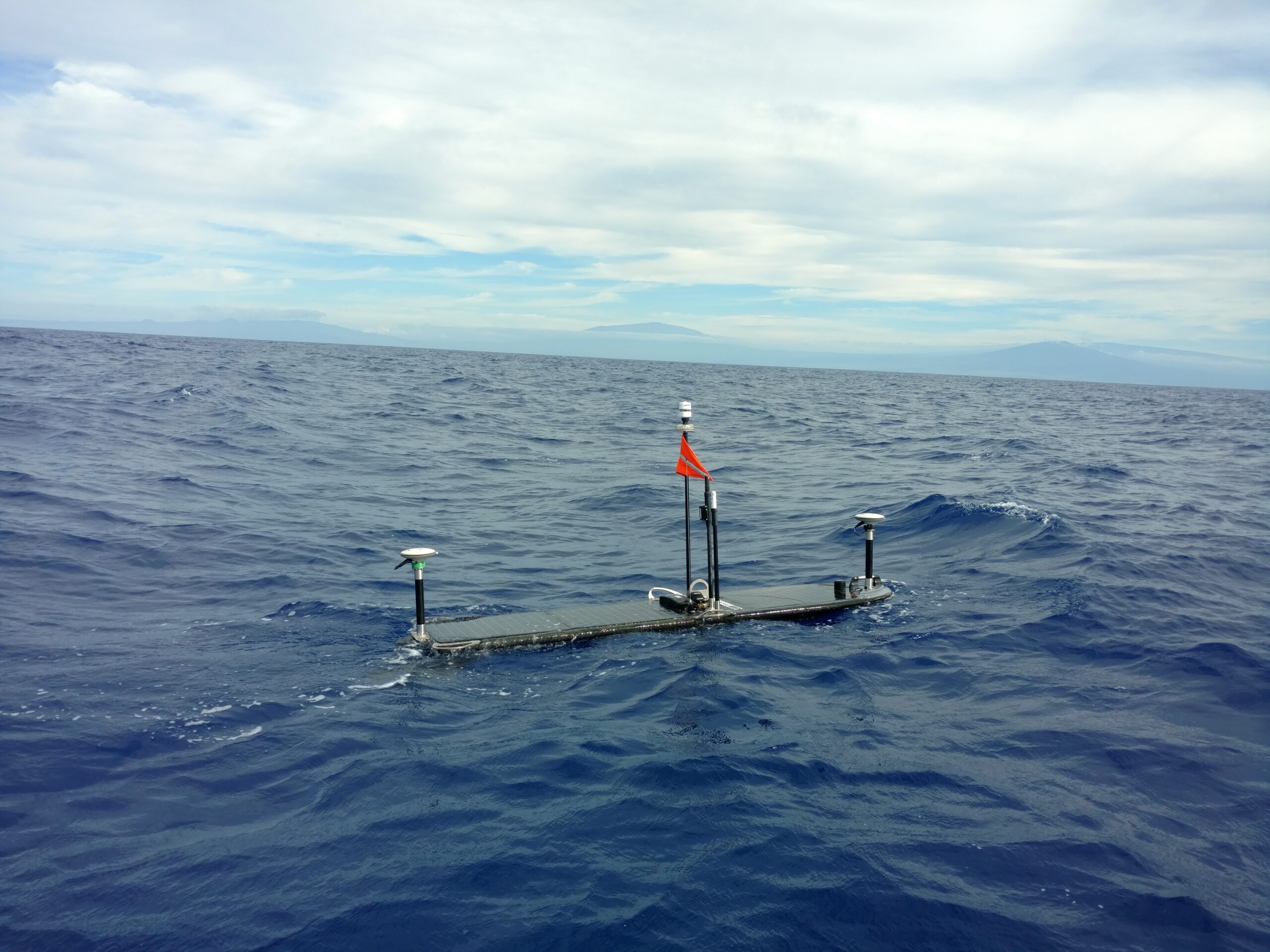
The satellite-based GPS and laser methods used on land don’t work in the ocean, so researchers are turning to a technique that’s referred to as GPS-Acoustics (GPS-A). While it’s possible to do these surveys using a vessel, unmanned surface vehicles (USV) like the Liquid Robotics Wave Glider and long endurance Sonardyne surveillance technology offer a more cost-effective solution to making GPS-A measurements.
To be able to accurately position a subsea transponder, you must first be able to accurately position the USV. This can be cost-inhibitive when it comes to academic studies. Similarly, oilfield asset monitoring becomes costly and impractical when relying on a combination of manned and unmanned vessels for visual observations and creep measurement.
Gathering seabed geodetic data is difficult, slow, expensive and not without risk to the people sent out to get the job done.

The solution
With long endurance instruments, such as Sonardyne’s Ambient-Zero-Ambient (AZA), which overcomes the inherent problem of pressure sensor drift, and a Wave Glider at the surface to position the transponders and transmit the data, there is now a viable alternative that provides near real-time awareness of plate tectonic activity.
Sonardyne’s Autonomous Monitoring Transponder(AMT) instrument is designed to autonomously and precisely measure horizontal and vertical displacement using thousands of range (distance between pairs of transponders), pressure (depth), sound velocity, and inclination measurements. Each unit runs a fully automatic data gathering and logging regime and can remain continuously deployed for up to 10 years.
Throughout a mission, the Wave Glider GPS-A payload records GPS logs in Receiver Independent Exchange (RINEX) format; a data interchange format for raw satellite navigation system data. This is a critical and unique part of the system’s ability to achieve millimetric precision.
By taking the GPS RINEX files and post processing this data with the corrected orbital paths of the GPS satellites themselves, it is possible to reduce the Root Mean Square (RMS) of the positioning by up to 30 times compared to typical GPS receiver accuracy.
Table 1 shows an Easting and Northing position scatter plot for an unmanned surface platform before (blue) and after (red) GPS-A post processing. The data was captured during a trial at Sonardyne’s research facility in Plymouth.
Similarly in Table 2, the plot shows a surface height comparison over a complete tidal cycle. Once again, the data in blue shows the raw observations, whilst the data in red provides the RINEX post processed results.
With these advances in technology, seafloor geodesy projects have sprung up around the world, in particular around the Ring of Fire in the Pacific basin where some of the most powerful earthquakes originate.
Study of the Cascadia Subduction Zone, research into the workings of the Mentawai Seismic Gap and geodetic observations of the Nazca-South American Plate Boundary are all using technologies developed by Sonardyne and Liquid Robotics.
Dr. David Chadwell of Scripps Institute of Oceanography selected Sonardyne’s Fetch instrument for the seabed component of his study of the Cascadia Subduction Zone. The Fetch has functionally equivalent to the AMT but with a much bigger battery that enables 10 year deployments. This has provided a more cost-effective platform to collect data. Their original plan to use a diesel powered buoy was also upgraded when the advantages of the Wave Gliders in terms of mobility and longevity were recognised.
Studies of the Mentawai Seismic Gap by Dr. Sylvain Barbot, Dr. Emma Hill, and Dr. Sharadha Sathiakumar of the Earth Observatory in Singapore, is being supported by quipping Wave Gliders with GPS-A technology. This is enabling them to monitor seafloor deformation off the coast of Sumatra. An unmanned platform is essential, as regular surveys using research vessels are just too expensive.
The Nazca-South American Plate Boundary has had a seafloor geodetic network of AMTs installed at key points ranging in depth from 2,600 – 6,000 metres. Rather than using absolute GPS-A measurements, the relative movement of the AMTs to each other is measured using the on-board pressure sensors and acoustic ranging between the AMTs.
The other key component of the Nazca-South American Plate Boundary network is a GPS-A equipped Wave Glider. Operating autonomously at the surface, the vehicle holds position above the seafloor stations, monitors system health, uploads data from the seafloor node, and transfers it back to shore via satellite – allowing the research vessel to focus on other more valuable tasks and facilitating the cost-effective retrieval of data from the seafloor.
The results
The impact of the technologies developed by Sonardyne and Liquid Robotics goes far beyond simply providing a cost-effective alternative to crewed vessels. As researchers pursue breakthroughs in earthquake and tsunami early warning systems, platforms like USVs may ultimately save lives.
These solutions are proven and ready for deployment today. Already they are broadening our knowledge of the deep ocean, geodetic data and the seismic relationships that impact coastal populations and oilfield asset monitoring.
Measuring Mount Etna – an underwater monitoring first
A network of Sonardyne instruments deployed by scientists from GEOMAR Helmholtz Centre for Ocean Research in Kiel for 15 months has measured underwater slippage of the southeast flank of Europe’s most active volcano, Mount Etna.
The challenge
While satellite observations have previously shown that the flank of the volcano is slowly sliding towards the sea, until the establishment of this network, it had been impossible to confirm if and how the submerged segment was moving beneath the ocean.
Results published in the international journal Science Advances confirm that the entire flank of the volcano is in gravity-driven motion and in one event the slope slipped about four centimetres in just eight days. The risk is that sudden and rapid failure of the entire slope could result in a catastrophic tsunami in the Mediterranean.


The solution
A network of five Sonardyne Autonomous Monitoring Transponders (AMTs) were deployed in April 2016 by scientists at GEOMAR and Kiel University. The placement of the transponders covered the fault line that represents the boundary between the sliding flank and the stable slope. Three AMTs were situated on the sliding sector and the final two on the side of the fault line that was presumed to be stable.
The AMTs acoustically measure the distances between each other with a millimetric precision. This sound based underwater geodetic monitoring network, so-called marine geodesy, was a first for monitoring a volcano’s movement underwater.
Geraint West, Global Business Manager – Ocean Science told us “The AMT is a highly flexible instrument that has been used by research institutes around the world to measure seabed movements as diverse as rapid canyon turbidity flows to plate motion at deep subduction zones. This project is the first time that it has been used to measure the slippage of a volcano’s submerged flank.”
“The AMT was originally developed to measure deformation of the seabed caused by the extraction of hydrocarbons over several years.” Tom Bennetts, Sonardyne Projects Manager added.
“Sonardyne first deployed AMTs on a large project over the Ormen Lange field in the Norwegian sector of the North Sea. For that project, some 220 individual instruments were deployed. The precision and endurance required for the Ormen Lange project showed us – and others – that our AMTs are also ideally suited for scientific studies of the seabed.” Bennetts clarified.
The results
The results published in the international journal Science Advances confirm that the entire flank of the volcano is in gravity-driven motion rather than the ascent of magma. One event saw the slope slip about four centimetres in just eight days. There is a very real risk that a sudden and rapid failure of the entire slope could result in a catastrophic tsunami in the Mediterranean.
Chris Hammersley, Project Engineer – Navigation Systems for Sonardyne said “Through several projects with major AMT deployments, we’ve built up a close relationship with the scientists and engineers at GEOMAR. We’re on standby to support them remotely through AMT deployment and routine data recovery missions. From our head office in the UK, we’re able to support these projects remotely, 24/7. For the Mount Etna Measurement project, we’ve been able to advise on optimal configurations for the instruments as well as troubleshoot any issues that arise, ensuring that GEOMAR have been able to use valuable ship time on site to best effect.”
The results of the study do not allow a prediction of whether and when a rapid failure of the slope might occur. For this reason, further research into the geological processes at and around Etna and other coastal volcanoes will continue. The success of our AMT deployments at Etna has secured the future use of sound-based geodetic monitoring networks for further studies.
Read more about GEOMAR’s project here.
Ranger 2 – it's anything but standard
Carbon Capture and Storage is increasingly seen as one of the key measures to help us reduce greenhouse gas emissions. Capturing it is one thing, storing it and making sure it stays stored is another, which is why the National Oceanography Centre (NOC) and others have been working to understand the nature of potential CO₂ leaks and test sensor capability to detect these.
The challenge
Understanding how carbon dioxide behaves in deep water environments requires specialist equipment and multiple sensors. The various systems need to be able to work together smoothly, fly through the water without drag and reliably stay in contact with above water instrumentation.
One of the NOC’s most recent missions focused on CCS. As part of the European Union Horizon 2020-funded Strategies for Environmental Monitoring of Marine CCS (STEMM-CCS), it focused on CCS in the North Sea.



The solution
The project, involving researchers from Germany, Norway, Austria and the UK, and industry partner Shell, centred on the decommissioned Goldeneye field, about 100 km offshore Scotland in about 120 m water depth. In May 2019, researchers and scientists onboard the RRS James Cook set out for Goldeneye for an intense period of scientific activity.
The aim was to simulate carbon dioxide (CO₂) leaks from the seafloor in order to test various sensors and systems for their ability to detect potential CO₂ leakages. This would help the teams understand how the gas behaves, and discover if seepage from the seabed worked its way up through the water column.
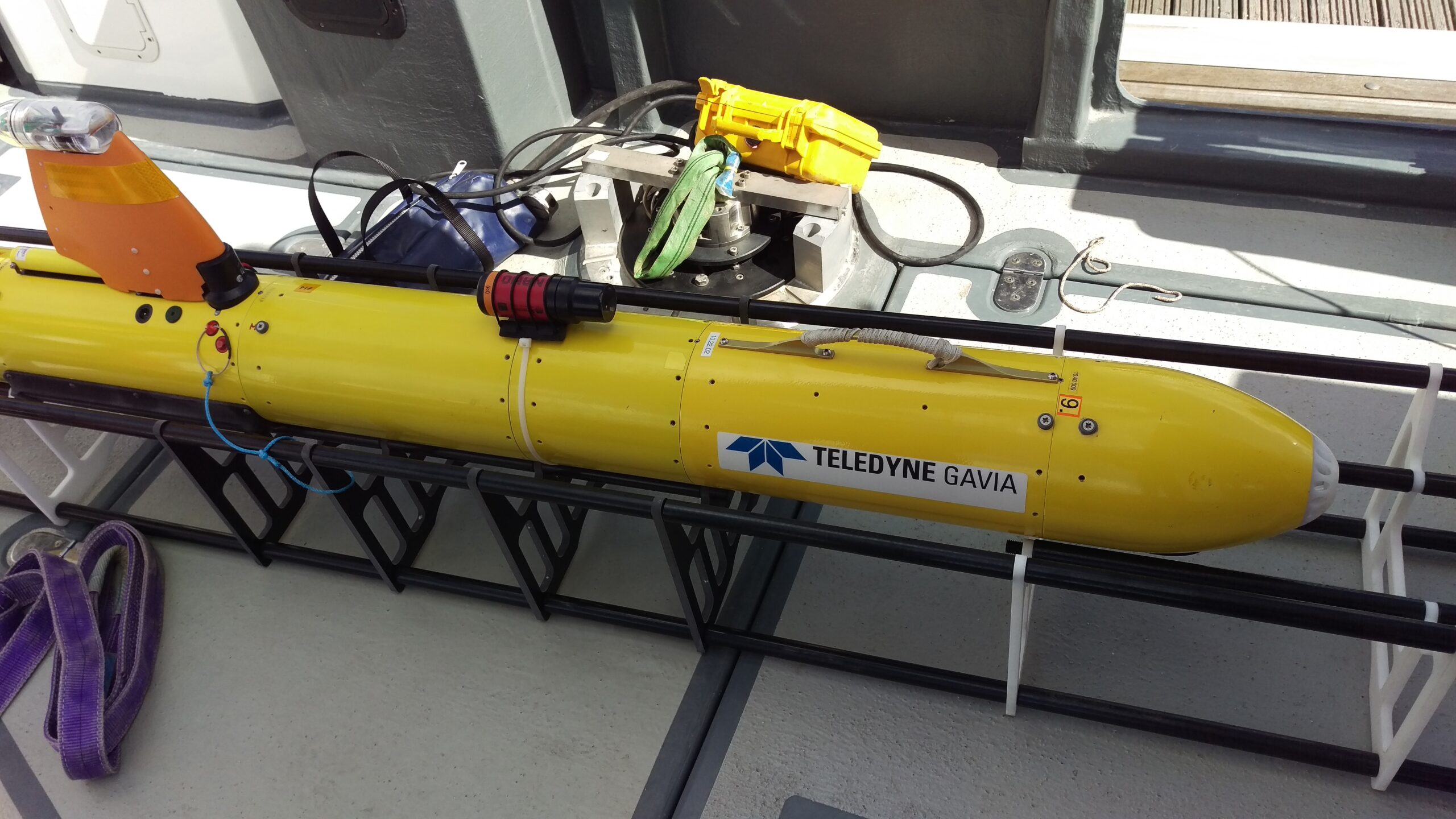
For mapping the area and wide-area chemical sensing, they used a Gavia autonomous underwater vehicle (AUV) called Freya. Because the Gavia had been adapted specifically for the mission – including fitting additional sensors to its body – operators were uncertain about how it would now fly through the water.
Our Ranger 2 system has underpinned the ocean science carried out by the RRS James Cook since it went into NOC service in 2006. It’s helped to track a whole host of vehicles and instruments, including NOC’s Isis ROV to 5,000 m deep. Indeed, on this latest mission, Isis, with a 6G Wideband Mini Transponder (WMT) onboard, was tracked using Ranger 2 during its many trips to the seafloor where it helped to accurately install an array of seabed equipment, sensors and instrumentation.
The Gavia Freya is classed as a low-logistics vehicle – meaning that only two people are required to deploy and recover it. Typically, Gavias measure anywhere between 1.8 m and 4.5 m in length, and just 200 mm in diameter. So when it came to choosing which USBL transponder to equip Freya with, there was really only one option Nano.
It’s our smallest 6G-enabled USBL transponder (just 160 mm tall by 52 mm diameter) and comes with features such as wireless charging, depth sensor and lightweight plastic construction. For this mission, Freya’s mission payload included a GeoSwath system for side scan sonar and bathymetry, mounted externally to the hull, supported by additional buoyancy. This provided a convenient place to the site the Nano. Freya was also used for photographic surveys and chemical sensing for pH using the SeaFET system.
For maximum operational flexibility, the RSS James Cook is permanently fitted with both our HPT 5000 (wide area) and HPT 7000 (deep water optimised) transceivers to separate, through-hull deployment spars. Whilst either of these medium frequency transceivers is capable of tracking a Nano, the shallow water at Goldeneye meant that the Gavia was tracked with the HPT 5000.
The results
“We were able to use the displays from the Ranger 2 to see that the Gavia was getting down to its working depth, usually around 100 m, as we were mapping the seabed,” says Mike Smart, Glider Engineer, Marine Autonomous and Robotic Systems, National Marine Facilities, NOC. “This was very useful as there was quite a lot of uncertainty about how the Gavia would behave given the extra payload it was carrying. Tracking data from Ranger was also shared across our network with survey and science teams elsewhere onboard.
“Being able to track the progress of the mission was another nice feature. With a much longer and heavier configuration of Gavia than we usually deploy, the time it needed to resurface was longer than we had predicted. So, being able to view the vehicle’s precise location, aided by regular depth updates from the Nano, meant we could more accurately predict surface times and not be anxiously waiting for Freya to reappear at the end of her survey run.”
This is just the latest time we’ve been involved in the work towards CCS. Past work demonstrates how our Sentry leak detection sonar and our Solstice side scan sonar are able to detect leaks, as static and dynamic sensors. Our instruments have also been shown to be able to support so-called chemical “sniffers” that can detect CO₂ (see Baselines 12 and 18).
While it’s still an emerging area, the industry is getting closer to making CCS offshore a reality – the first offshore carbon storage license was awarded in the UK in 2018, followed by a new license for a significant storage site in Norway in 2019.
Speak with one of our experts to learn how we can make your CCS project a success.
Recovering lost history with Mini-Ranger 2
In its working life, there were more than 2,500 Fairey Barracudas delivered to the Royal Navy’s Fleet Air Arm. That’s more than any other type ordered by the Royal Navy to date. Read how James Fisher Marine Services used our Mini-Ranger 2 USBL system to recover this piece of World War II aviation history.
The challenge
A three-seat, single engine torpedo bomber, it was launched from aircraft carrier decks during World War II, carrying their lethal load to drop on to targets. Despite the numbers that were built, none remain in the UK today, at least not in complete form. However, restoration engineers at the Fleet Air Arm Museum (FAAM) in Yeovilton are looking to change that and a chance find in the English Solent is helping them on their way.
It’s the wreck of a Mk II Fairey Barracuda, discovered in 2018 by James Fisher Marine Services (JFMS) during a UXO survey for a new 204 km long power interconnector between the UK and France as part of the Interconnexion France-Angleterre 2 (IFA2) project.
IFA2 is National Grid’s second electricity subsea interconnector to France and is a joint venture with French System Operator RTE.
The wreck is believed to be one of two Barracuda aircraft which were based at Lee-On-Solent, Gosport. Both planes suffered forced landings in the Solent during WW2, shortly after take-off from HMS Daedalus airfield. While each pilot survived and made it through the remainder of WW2, their planes remained at rest on the seabed.
A challenging acoustic environment for USBL systems
Recovery of the wreck offered a great opportunity to the Fairey Barracuda restoration effort. But, it also posed a number of challenges, not least the water depth – or rather lack of it. Lying in just 5 m, Robin Fidler, who was then Survey Operations Manager at JFMS, expected to encounter acoustic interference problems tracking his divers due to signals bouncing off the seafloor and sea surface – often referred to as multipath.
Multipath can cause a USBL transceiver at the surface to falsely detect (or completely miss) a genuine reply signal from a transponder, leading to unstable tracking performance. Previous generation USBLs were particularly susceptible to multipath and needed careful setup to overcome the problem – not always successfully.















The solution
JFMS chose our Mini-Ranger 2 USBL system for the project. Mini-Ranger 2 is our mid-level USBL target tracking system. It provides shallow water performance without the cost and complexity of a deep water USBL solution. It’s also portable and quick to mobilise; a great choice for small survey vessels, moored barges and uncrewed vessels.
Six divers were used on the three-week project from the Stour jack up barge, with one diver in the water at any one time. The barge itself was fitted with an HPT 3000 transceiver mounted to the side, cabled back to a survey shack where the diving operations were controlled from.
WSM 6+ transponders fitted to each diver’s cylinder enabled the HPT to track every moment of their dive, providing a valuable layer of safety to the operation. Each diver also carried one of our Nano transponders in their pocket, this was used to place directly on top of any archaeological finds, so that precise waypoints for each artefact they discovered could be logged (and individually named) in the Mini-Ranger 2 USBL software. This information is then available for offline analysis.
The Mini-Ranger 2 USBL uses Wideband 2 for digital signal processing, so multipath never became an issue for the recovery operations, regardless of the depth of the tide. This had the additional benefit of freeing up users to deploy our USBLs virtually anywhere.
The results
The crash site was heavily silted so it needed to be cleared away for sections of the aircraft to be lifted out of the water. Artefacts retrieved included one of the pilot’s boots, a boost gauge and the underwing pitot head and mounting bracket – a delicate instrument that was used for recording the aircraft’s airspeed. The fact that this was found intact implies that the Barracuda was almost at stalling speed by the time it reached the water, says Wessex Archaeology’s Senior Project Manager Euan Mc Neill.
“We were really impressed with just how Mini-Ranger 2 operated,” says Fidler. “We thought we were going to have to use a (Fanbeam) laser radar system, tracking a reflective buoy attached to the diver to give us a range and bearing to the diver. We didn’t have to use it once; we could do it all with USBL, no matter what the tide, which made our lives much easier and that’s all we could ask. The USBL didn’t miss a beat. We were up and running with it quickly meaning that we were able to maximise the three week window we had on site.”
Extending the limits of autonomous system
Sending autonomous and unmanned underwater vehicles (AUV/UUV) out on missions that will last for days or weeks, unaided by vessels or any other supporting offshore infrastructure is a major goal for the ocean science, offshore energy and defence sectors.
The challenge
Improving the endurance and navigational precision of underwater autonomous systems, while also reducing costs, could provide disruptive capability in the subsea monitoring and inspection space. All three are goals in a two-year collaborative project we are leading.
If you can do this you remove the need for a surface vessel. Risk to personnel and mission costs are reduced along with the environmental footprint generated by manned surface vessels. You are able to survey more seabed for longer and with fewer or even no people offshore.
Current constraints on AUV or UUV operations, such as limited power capacity and navigational accuracy degradation over long deployments, means that the capabilities of these systems are not quite able to meet mission requirements on their own.



The solution
We’re leading a two year, £1.4 million project, with partners the National Oceanography Centre (NOC) and L3Harris ASV, to change all that. We aim to develop new positioning technologies that will extend the limits of AUVs and UUVs.
The project – Precise Positioning for Persistent AUVs, or P3AUV for short – is supported by funding through Innovate UK’s research and development competition for robotics and artificial intelligence in extreme and challenging environments.
So, what’s involved? In short, we’re developing ways to provide greater positioning accuracy for long-endurance operations in deep water. At the same time, we’re reducing power requirements for AUVs and UUV. We’ll also be increasing the use of autonomy to make Long BaseLine (LBL) positioning transponder box-in faster and easier, with onboard data processing and calibration.
This is all being done through work in three key and complementary areas: improved lower power navigational accuracy over long distances for AUV/UUVs; autonomous transponder box-in with an unmanned vessel; and improved positioning accuracy during vehicle descent/ascent in the water column.
Central to this work is the vehicle’s acoustic and inertial navigation system (INS). This is because low power sensors have much lower navigation accuracy meaning they often have to surface to correct positioning error with a GPS fix. However, by integrating low and high-power sensors to work together, the best of both worlds – high performance and much lower power consumption – can be achieved.
As an example, the NOC’s Autosub Long Range (ALR) currently uses a low-power microelectronic mechanical system (MEMS) supported by separate Doppler velocity log (DVL) and ADCP input to calculate how far it has travelled on missions. These missions can be several months long. To increase the ALR’s positioning accuracy over longer distances, we’re using our SPRINT-Nav, alongside MEMS technology to work towards high-precision solutions that save space and power.
The project also involves improving positioning accuracy when subsea vehicles transition through the water column. This is a notoriously difficult area for AUV deployments, because it relies on the Doppler velocity log (DVL) being able to ‘lock’ on to the seafloor (bottom lock), so that vehicle XYZ velocities can be calculated, supported by pressure data.
However, DVLs are range limited, so there is often a period where the DVL is out of range. When there are thousands of metres of water between the surface and the seabed, this can introduce significant positioning uncertainty. This problem is solved by using the acoustic Doppler current profiler (ADCP) capability in our SPRINT-Nav INS instrument (looking down) and a second Syrinx DVL (looking up). We can then build up a layer by layer profile of the water column velocities that can be used as tracking layers.
The objective is to reduce positioning errors significantly during both the dive and surfacing phases of an operation. This does depend on the variability of the current regime in any given area, but we’re putting this to the test throughout the P3AUV project.
The data collected during the descent and surfacing phases can be processed to provide a full ocean depth current profile – collection of which is required for many offshore energy projects. It can also be valuable for ocean research.
At the heart of this capability is our class-leading SPRINT-Nav instrument, which combines our SPRINT INS, Syrinx DVL and a high-accuracy pressure sensor in a single housing. These instruments are tightly integrated, enabling the SPRINT-Nav to use individual beam level measurements from our Syrinx DVL. This makes it a much more robust and reliable system than a separate DVL, which calculates velocity from all the beams.
Additionally, we’re implementing systems to box-in our trusted Compatt seafloor positioning transponders with a USV to make LBL operations faster and easier.
The goal is to enable full ocean depth, 1 m accuracy wide-area seabed mapping, using the L3Harris ASV’s C-Worker USV, to precisely position them (box them in). These Compatts could then be used in combination with SPRINT-Nav to calculate a Sparse Long BaseLine (Sparse LBL) solution.
Using autonomous calibration techniques will remove the need for a manned vessel to do this, providing a dramatic cost saving over current ‘state-of-the-art’ AUV operations, as well as any other operations where an LBL positioning system is needed.
To put this into perspective, an offshore support or research vessel will typically burn some 3,000 tonnes of fuel annually and generate about 10,000 tonnes (equivalent) of greenhouse gases. The environmental footprint of an independent ASV or AUV is, by comparison, negligible.
The reduction of manned vessel operations, as well as reducing deployment/recovery of vehicles over-the-side of such vessels, will reduce risk in offshore survey operations. Furthermore, the ability to mobilise this capability at short notice, without the high cost of mobilising a ship, could generate a new service industry model.
The results
Combining all of these capabilities will bring about a step-change in AUV operations, providing a disruptive capability in the subsea monitoring and inspection space. Indeed, reducing the cost and improving the navigation precision of autonomous ocean research in remote areas could bring a disruptive capability to a wide variety of applications.
Sustained ocean observation without the need for ship support is coming under increasing focus from the research community, especially in ice-covered polar areas. Long-duration navigational capability is also a key enabler for persistent covert surveillance operations in the defence sector, as well as emerging applications, including resident seabed-based systems, deep sea mining, aquaculture and UXO surveys for renewable installations.
There are also emerging requirements to monitor decommissioned offshore infrastructure ‘in perpetuity’, all of which will generate a market for this rapid and efficient mode of seabed navigation. As the only company that produces a complete hybrid acoustic navigation solution for AUVs, we are uniquely placed to work with our partners L3Harris ASV and NOC to produce a game-changing capability through the P3AUV project.