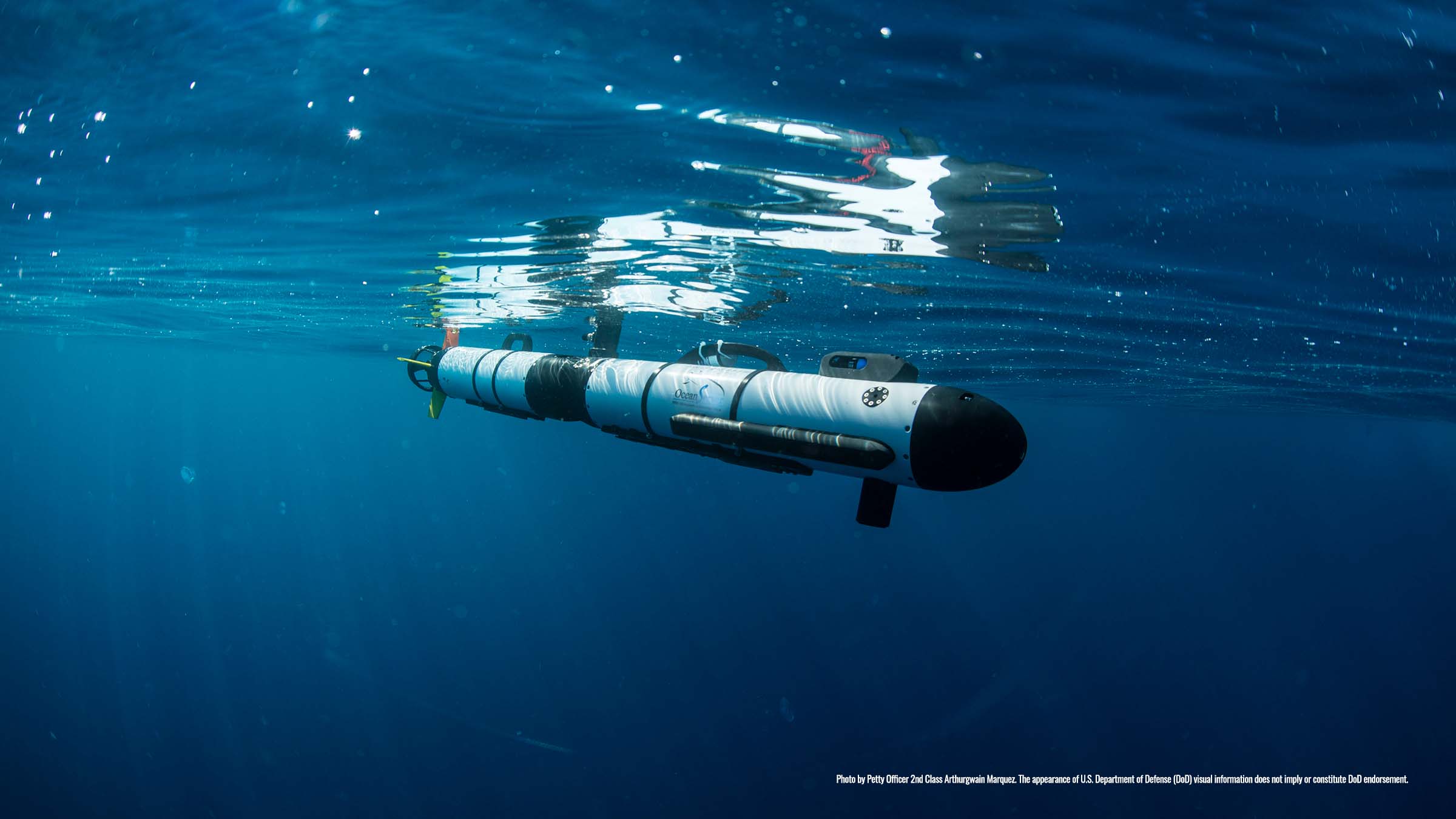
Sentinel expeditionary – Intruder detection where it's needed
When we initially developed Sentinel to detect underwater intruders the world was a very different place. At that time, the Cold War was history, and the underwater threat was from rogue state actors and terrorists. Combat divers posed a significant asymmetric challenge: capable of swimming undetected they could cause major damage to our ships and platforms.
The challenge
Detecting divers effectively was no easy feat. Navy labs had been developing and fielding large, heavy sonars that were seeking to protect naval ports. It was quickly apparent that costly mobilisation and maintenance operations made them unsuitable for permanent deployments.
Weighing at approximately 250 kg, they proved difficult to transport and almost impossible to deploy from vessels of opportunity.
Fast forward to today, a new cold war is brewing. Peer adversaries are developing new capabilities and adding to the list of threats. Combat-divers remain a significant threat to assets and sailors. The recent attacks on the port of Fujairah are a clear example of what can happen when the guard is let down. Now, unmanned underwater vehicle (UUV) systems have also evolved alongside this threat. UUVs have a smaller signature than divers and can move faster.








The solution
A new approach was required and so Sentinel was born. Sentinel was the first intruder detection system designed to be portable. It weighs just 35 kg. Design parameters were carefully selected to improve the detection and tracking capabilities in comparison to existing systems.
Typically deployed in shallow waters and with a requirement to detect threats as far as possible, the design carefully considered the challenges from operating in confined areas, such as complex sound velocity profiles, multipath effects and shadow zones. As a result, Sentinel uses a circular transducer configuration to ensure even coverage.
Modern computing and cutting-edge algorithms enable Sentinel to track and analyse a large volume of targets. Improvements were made without compromising performance. Sentinel’s range and detection rates were far superior to that of the larger systems. Its size made it truly expeditionary. The system could be mobilised to set up a protective perimeter for your amphibious forces one day or to monitor a sensitive choke point the next.
As new threats emerge, our navy customers want to ensure that their existing Sentinel systems can meet them. After all, the design parameters were carefully selected to improve the detection and tracking of divers. Can they meet the underwater drone challenge?
Each sonar head was designed to operate at 70 kHz with a 40 ms pulse to improve the signal-to-noise performance and to increase the effective range of the system. The 20 kHz bandwidth provided an effective 3.75 cm range resolution. Sentinel emits a 360° linear-period-modulated (LPM) pulse and uses 256 receive beams equally spaced along its perimeter to discriminate targets in up to 1500 m range even at high velocity.
The results mean Sentinel can detect scuba divers up to 1,000 m range and divers with rebreathers up to 700 m. Sonardyne engineers had the anecdotal experience that the system could detect and track UUVs, but more concrete data was needed to ensure that performance was suitable for the task.
A set of experiments conducted during the Advanced Naval Technology Exercise (ANTX 2019) in collaboration with the US Naval Undersea Warfare Center (NUWC) in Newport, RI demonstrated improved performance using Sentinel against combat divers and a one-man portable Riptide µUUV.
ANTX has become a key naval technology collaboration, development and demonstration event in the US calendar. It brings together more than 1,000 naval, academic and industry attendees at the US Naval Undersea Warfare Center’s (NUWC) Narragansett Bay Test Facility (NBTF) in Newport. The NBTF is a test and evaluation facility designed to support research and development work in advanced underwater weapons and weapons systems, weapon launchers, UUVs and oceanographic equipment.
The Riptide µUUV provided a formidable target. Manufactured by BAE Systems, the Riptide is just 12.4 cm in diameter and weighs under 12kg. The man-portable small, unmanned vehicle is a sophisticated yet simple, efficient, and highly flexible platform.
In the exercise, multiple threat runs using both divers and the µUUV were carried out against Sentinel over two days. In some cases, the runs used threat tactics, such as moving along harbour walls and zig-zagging courses, designed to make tracking as challenging as possible. The results demonstrated that Sentinel continues to be up to the task.
That same year, the Slovenian Armed Forces (SAF) 430th Naval Division put our Sentinel through its paces in their own test. As part of a broader multinational exercise, their Underwater Special Operations Detachment carried out operations alongside a group of divers from the Montenegrin Navy.
The 430th Naval Division of Slovenia’s Armed Forces often use their Sentinel from vessels in port, while at anchor. For the multinational exercises, they deployed it from a pole mount from the patrol boat stern platform. Starting with integration drills, involving underwater and surface inspection of the operational area, they moved on to joint inspection of navigable waterways, followed by a mine hunting and detection exercise around moorings used by allied vessels.
Throughout, the underwater part of the port’s disembarkation area – which is protected by the 430th Naval Division – was monitored using Sentinel. It was then used to steer the force reaction towards the simulated intruders.
Weighs just
0
kg
Operates at
0
kHz
0
ms
pulse
Uses
0
beams
0
metre range
The results
The Sentinel Expeditionary System is perfect for short term operations using Offshore Patrol Vessels (OPVs) and temporary sites onshore. Navies use it as part of naval exercises, to provide protection at specific events such as during the Olympics, or protect their expeditionary forces where they are operating.
Both the ANTX experiments and the 430th Naval Division’s use of Sentinel shows its flexibility – it can be deployed and redeployed from different vessels, quaysides, subsea mount frames or even buoys. In other words, our Expeditionary Sentinel System provides intruder detection where it’s needed.
Our navy customers also want to know how to optimise the system for each new environment. The performance of any sonar system is heavily dependent on the target of interest and the environment the system is being operated in. Fortunately, Sonardyne has developed performance prediction tools. These determine the performance of the system in different environments against different types of threats. The tools consider deployment options and provide effective metrics to your team.
With sufficient time a site survey informs the user where to deploy sonars to improve the performance of Sentinel. These surveys can also be conducted remotely. Our training includes how to operate these tools meaning that our customers can conduct those surveys and remain at arm’s length from our support teams.
Most navies still consider Sentinel to be the intruder detection of choice. They need a system they can count on and that will stand up to emerging threats. These threats exist now. Equipped with a Sentinel Expeditionary System, a two-person team can rapidly mobilise on-site, use the output from the site survey to deploy the Sentinel and keep a constant vigil. Any threats will raise the alarm. This data can be interfaced with a third-party command-and-control system if required.
Improved MCM operations using multi-aperture sonar
The evolving requirements from world navies are challenging innovators to improve mine-hunting capabilities. In the face of declining budgets, navies want to improve percentage clearances, minimise risk by removing more personnel from minefields and get the job done quicker. With growing budget restrictions, it’s easier said than done.
The challenge
Uncrewed systems are the preferred choice for navies in support of mine countermeasure (MCM) operations. The first navy to deploy these operationally was the US in Operation Iraqi Freedom. Here an early version of the Mk 18 Mod 1 “Swordfish” underwater vehicle was used in support of mine clearance operations.
Since then, many navies have acquired small, man-portable systems to conduct operations in very shallow waters and larger systems for operations in deeper waters. The performance of the Royal Australian Navy’s Bluefin-9 and the medium-sized Bluefin-12 unmanned underwater vehicles (UUVs) has demonstrated that ocean robots have a significant role to play in MCM missions.
These kinds of underwater vehicles succeed because they provide a stable platform in which to mount payload sensors and do a great job of surveying the seafloor, at a constant height from the sea bottom. However, while operating, their data is stored within the system until it can be recovered and the data uploaded to a computer. This leads to delays in completing the operation. One way to combat this is to use uncrewed surface vessels (USVs) to complement their underwater cousins. This enables real-time access to data and facilitates a faster tempo for operations. Just like the underwater vehicles, to be successful a USV needs to provide a stable platform for its payloads and get them close to the seafloor.












The solution
Sometimes the solution is already there, all you need to do is piece it together. Equinox uses existing technologies as building blocks to create a new solution for improving MCM operations.
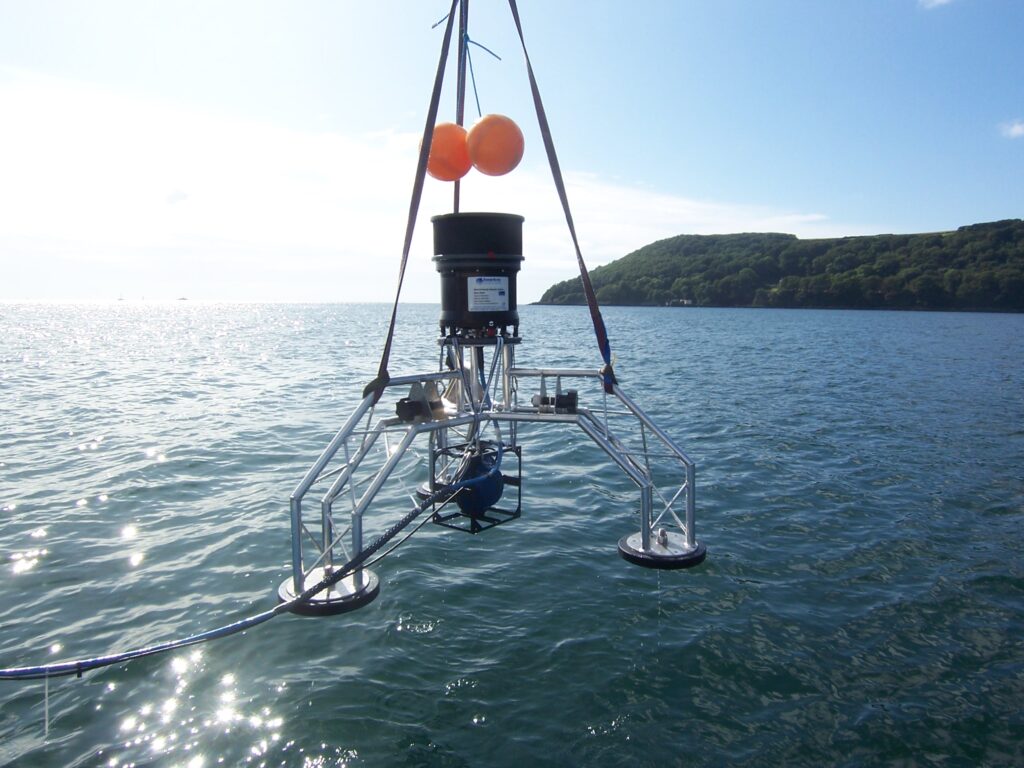
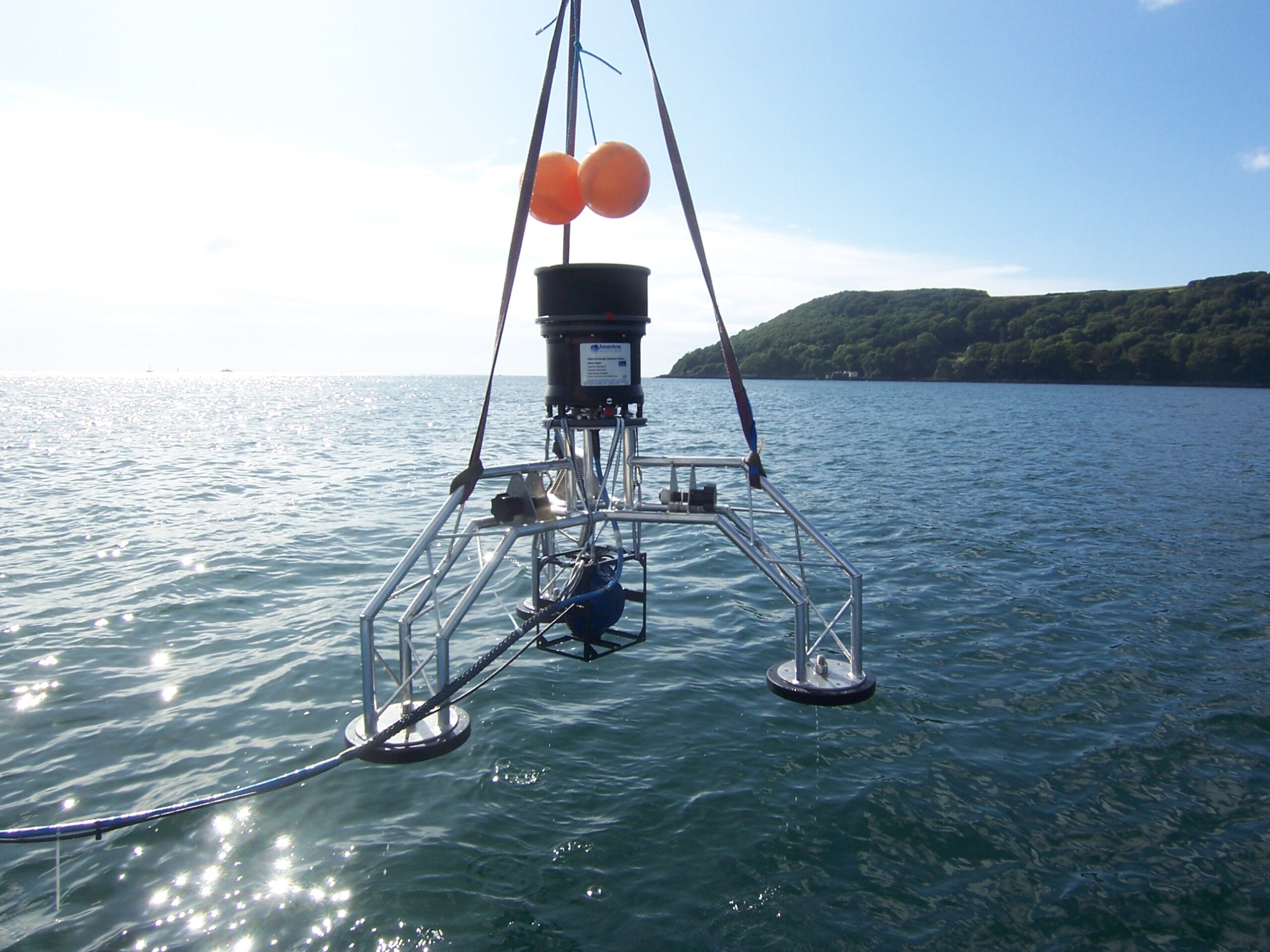
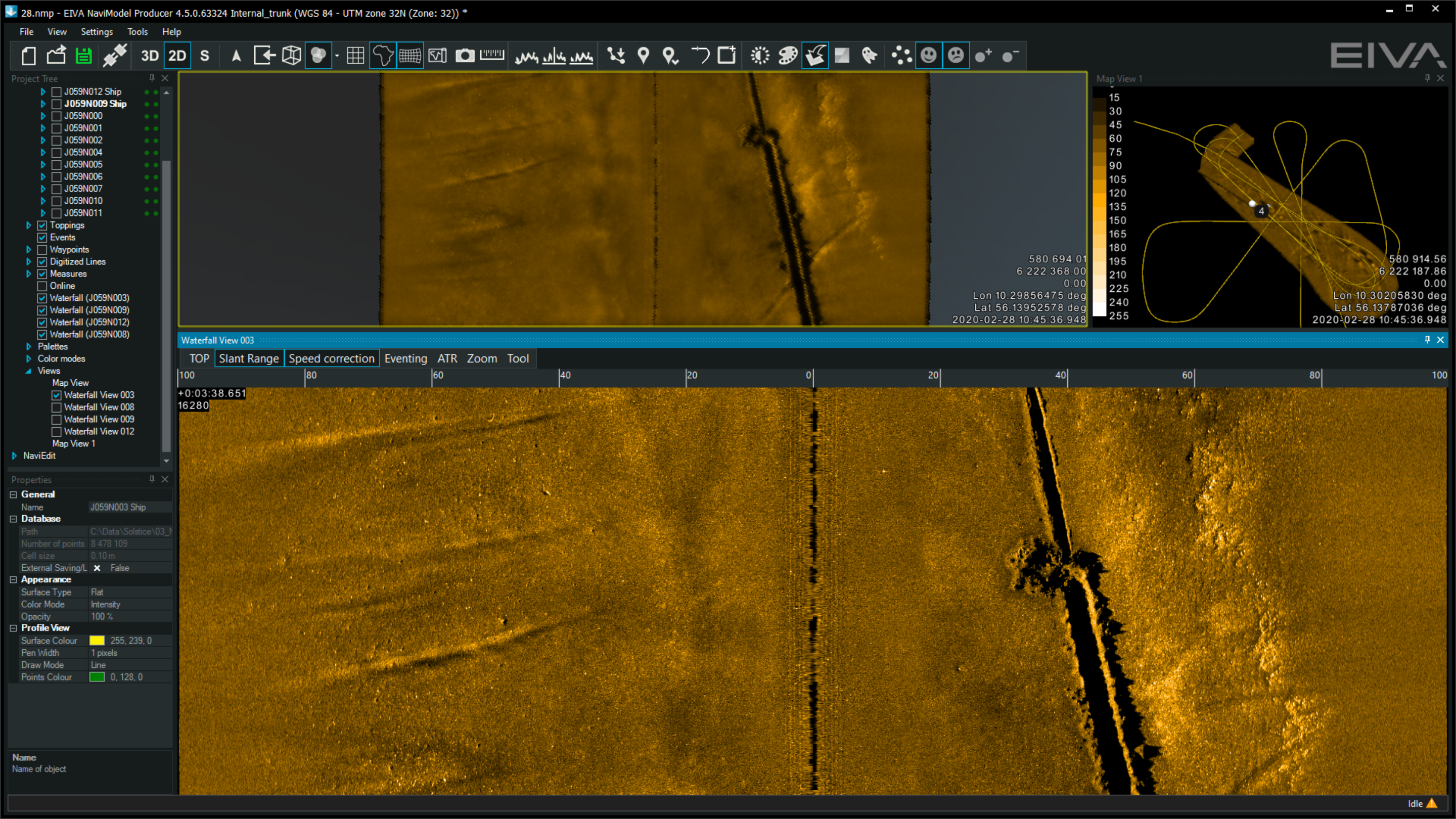
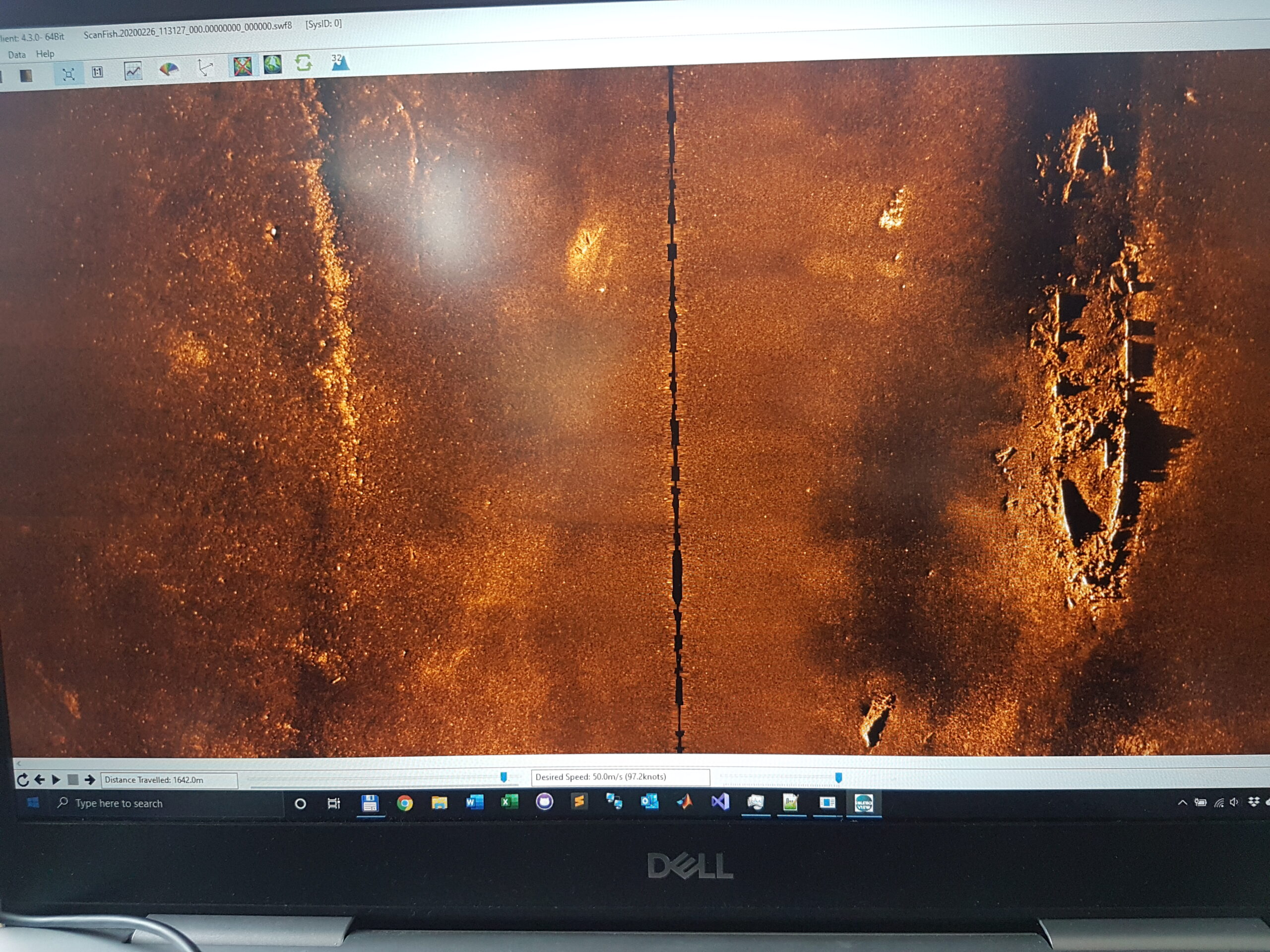
Solstice mine-hunting sonar
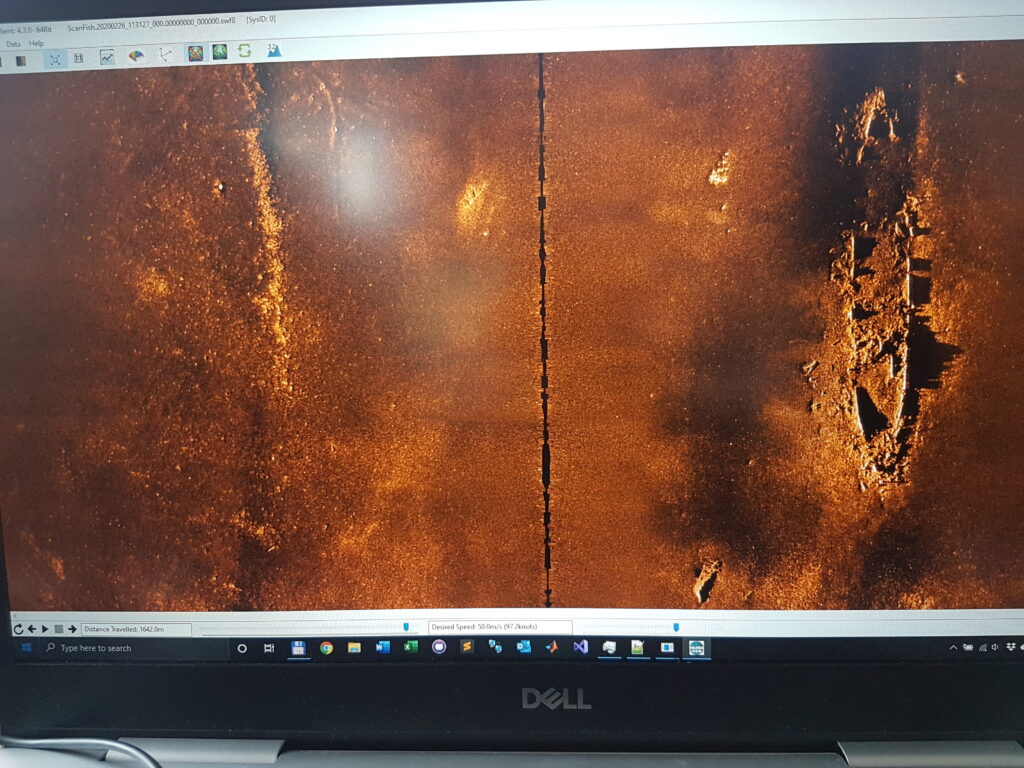
The first building block used to create Equinox is Solstice. Our Solstice was designed by our sister company, Wavefront, to deliver the ultimate mine-hunting side-scan sonar. Solstice uses a proprietary array design and multiple apertures to improve the signal-to-noise ratio performance, capturing stunning imagery at longer ranges than other sonars at the same frequency. Typically operating at 750 kHz it scans a 200 m swath and delivers a brilliant along-track resolution of 0.15°.
One example available in the public domain shows Solstice was able to both detect and identify lobster pots across a 200 m swath. These man-made targets are typically smaller than mines so constitute a great target, illustrating that Soltice is more than capable of the MCM sonar task.
However, to make Solstice work when deployed from a USV several technologies need to come together. First and foremost, it needs a stable platform capable of keeping Solstice at a set height from the seabed as it travels through the water. This is where the next building block, ScanFish 3D, comes in.
EIVA’s ScanFish 3D
Our other sister company EIVA manufactures ScanFish 3D. The ScanFish 3D is a trusted ROTV platform capable of sailing through the water at a constant height from the seafloor. Designed to be both very stable when surveying and highly dynamic when needing to surface at high speed, there is no need to constantly pay cable in or out to adjust the height.
ScanFish 3D can carry a significant payload and is stable enough for Solstice to excel. Strong enough to be equipped with navigation instruments to accurately geo-reference the data, the platform demonstrates performance similar or better than an AUV, keeping an almost constant heading, pitch and roll as the AUV gathered data.
This means that the sonar data can be acquired at the sweet spot for the sensor at 7.5m from the seafloor. Once the data has been gathered, it needs to be georeferenced. This leads us to the next Equinox building block, SPRINT INS.
SPRINT INS minimising position errors
Typically, navies require a 5 m (DRMS) absolute position error for any contact surveyed during mine-hunting operations. The requirement is driven by both the technical limitations of the solutions used to date and the assumption that to re-acquire a target within that position error is achievable. However, in challenging environments, a 5 m error translates as time wasted in the actual process of re-acquiring and identifying the contact.
Commercial-off-the-shelf (COTS) instruments solve this problem effectively at a lower cost. Using a SPRINT INS aided by a Doppler velocity log and a Mini-Ranger 2 ultra-short baseline (USBL) system, Equinox can localise targets within 1 m (DRMS). This decreases uncertainty in MCM missions while improving tactics and the tempo of operations.
Inertial navigation is inherently self-contained, robust and with very good short-term accuracy, but it can drift over time. Therefore, the INS is aided with complementary acoustic positioning, i.e. the DVL and USBL, to provide long-term accuracy and robustness. Conversely, the additional integrity offered by the integration of the INS significantly reduces operational delays during periods of challenging subsea acoustic conditions, such as aeration and noise. In addition, the heading accuracy reported by SPRINT minimises lever-arm effects for targets at the furthest range from the sonar. This is a large source of error in towed sonar systems.
Extensive trials have taken place to test the navigation accuracy achieved by the combination of instruments that form Equinox. In one trial, two bicycles were lowered to the seafloor. They were placed at known positions and were used to establish the navigation accuracy of the system. The results demonstrated the performance to be less than 1 m (1 DRMS), as expected.
With the performance of the combined systems delivering far better than expected results, there is just one last building block needed to complete the solution; the software that stitches it all together.
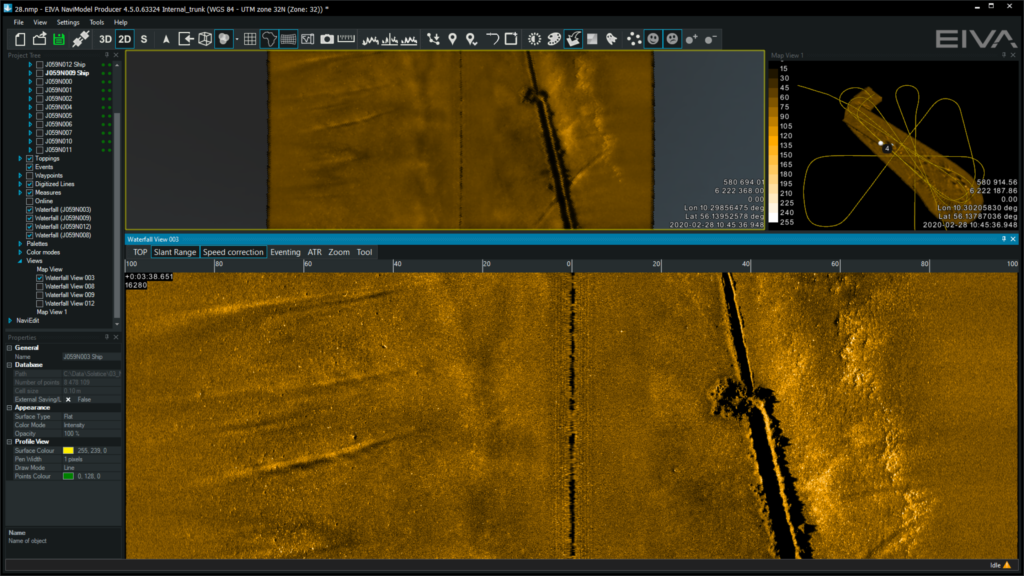
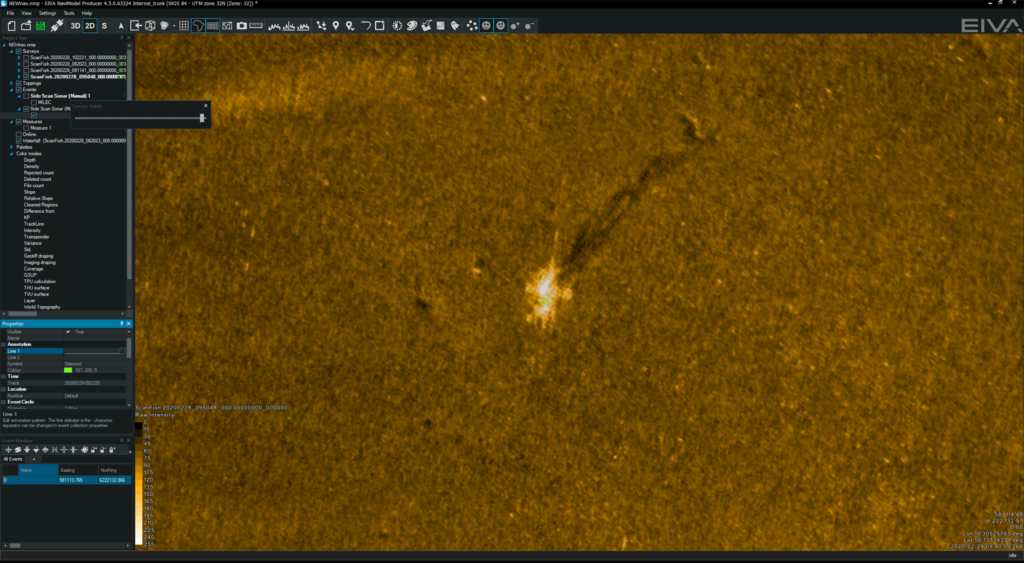
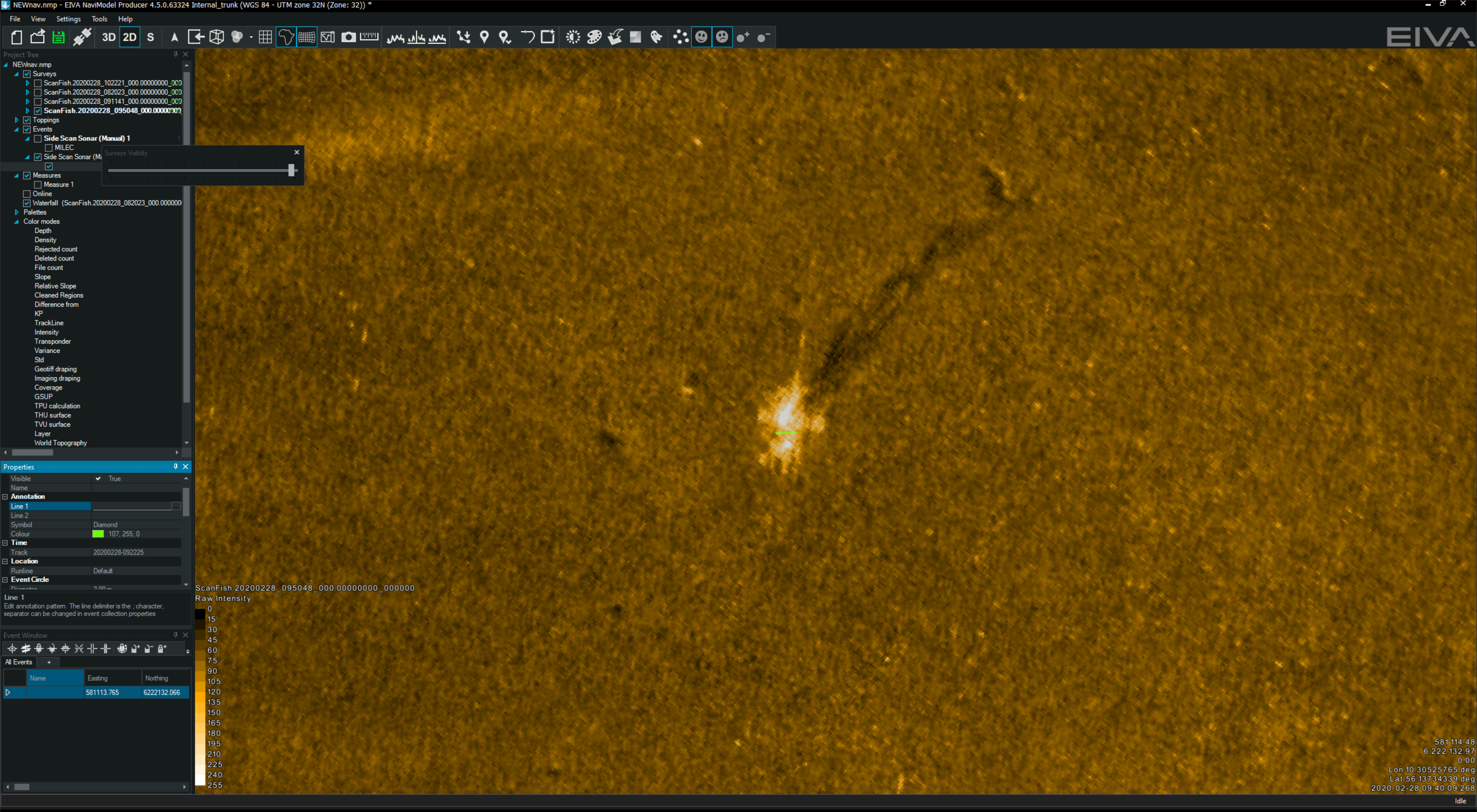
NaviSuite Kuda
Completing the system is NaviSuite Kuda software, which is used to plan, monitor, and process the data from the Equinox system. NaviSuite Kuda has also been developed by EIVA and is another COTS system used by hydrographers worldwide to run their underwater projects.
To plan a survey, the user defines the sailing route and run lines by simply selecting the area that needs to be surveyed. The software generates a plan that can be fed directly to the USV control software (or to a skipper if using a crewed vessel).
During an MCM mission, NaviSuite Kuda continuously updates the vessel and ScanFish 3D position in real-time. The navigation and Solstice data is processed and displayed on the screen enabling an operator or automatic target recognition (ATR) algorithm to review it as it is being gathered. The information can then be used to inform the next stage of the mission while the survey is taking place.
The results
The critical advantage that Equinox offers over competing systems is that it is made from combining products that retail as COTS. This means its component parts have been deployed in thousands of mobilisations and have been proven, time and again, to meet or reduce error margins.
Equinox selects best of breed COTS to deliver a step up in capability. The result is improved performance compared to standard side-scan sonar systems, improved navigation accuracy several times better than any other system in the public domain, and at a price exceedingly lower than competing products that have been specifically designed to conduct mine-hunting operations.
For a navy this means an enhanced ability to mobilise a capability quickly, using components that can be easily looked after and maintained and feeding into existing training programmes and a community of existing users.
Dude, where's my ocean robot?
Autonomous naval robots are operating for longer and travelling further. Enabling them to know where they are underpins every mission so we have been investing in navigation technology that improves accuracy over time and distance.
The challenge
Any submariner will tell you that navigating underwater is no easy task. That’s because links to the global navigation satellite system (GNSS) are unreliable. Instead, submariners tend to make do with other sensors. SPRINT-Nav X, is our most accurate system yet, as the UK’s national Defence and Security Accelerator (DASA) and the Defence Science and Technology Laboratory (Dstl) would discover.
It’s a different story for autonomous craft and a lot harder to navigate without a crew. That’s why almost all uncrewed operations at sea today require access to a reliable GNSS signal. Without it, vehicles are literally lost at sea.
Our peer adversaries are investing to develop tools that block our access to GNSS, ensuring they can operate, while we’re left in the dark. It’s not just deliberate signal jamming or degradation of performance – known as spoofing – that can interrupt connections with GNSS. Loss of satellite-based timing and navigation signals needed for positioning occurs where GPS or GNSS receivers may not have a clear line of sight with the sky. This frequently affects ports and harbours situated close to tall structures or even close to cliffs and inside fjords.
We figured there had to be another way to keep track of autonomous underwater vehicles (AUVs) and remotely operated vehicles (ROVs) in challenging underwater environments. So, Sonardyne entered Phase one of the Autonomy in Challenging Environments competition run by DASA on behalf of Dstl.






The solution
We started out with the SPRINT-Nav, which is already the world’s highest performing all-in-one hybrid navigator for uncrewed vehicles, to create the hybrid navigation system, SPRINT-Nav X. This is our highest-grade SPRINT-Nav in the SPRINT-Nav family to date.
We innovated to combine four instruments in a single subsea pressure house: an attitude-heading and reference system (AHRS), a depth sensor, a Doppler velocity log (DVL) and an inertial navigation system (INS). All onboard sensors were optimally integrated to provide seamless operation and unprecedented levels of performance when compared with standalone instruments.
SPRINT-Nav also integrates individual DVL beam velocities thus providing sub millimetre level relative accuracy and making SPRINT-Nav robust over structures and rugged terrain.
However, SPRINT-Nav X delivers more certainty and higher accuracy while dead-reckoning and still maintaining the same form factor and weight as the other systems in the family. This level of performance opens the door to improved capabilities while still using commercial-off-the-shelf instruments.
Would this level of performance be sufficient to replace GNSS positioning?
DASA autonomy in challenging environments
Working with a 12 m-long SEA-KIT X class unmanned surface vehicle (USV), Sonardyne tested and validated SPRINT-Nav. How could we determine if it could be used instead of GNSS? We integrated with a SEA-KIT X and tested it against local GNSS for real-time kinematic (RTK) 50 mm accuracy positioning.
The SEA-KIT is a 10,000 nautical mile-range vessel able to carry up to 2.5 tonnes of payload, deploy and recover AUVs and ROVs. This capability, and flexibility, means it is well suited to support naval missions including intelligence gathering, hydrographic surveying and as a communications gateway.
We learned that SPRINT-Nav can provide a high integrity, continuously available navigation solution for a USV, like SEA-KIT X, operating in littoral zones in water depths up to 150 m.
SEA-KIT range
0
nautical miles
SEA-KIT can carry
0
tonnes of payload
0
km
mission
0
hour
long mission
The results
In 2020, during the exercise the team ran several missions, the longest of these was a 90 km mission that lasted over 13 hours. The mission was conducted in tough conditions with a swell of 2m and approximately 20 degrees of roll in places. The altitude of the USV was anywhere between 0.5 to 70 m from the seafloor with deep and shallow gradients and difficult terrain that included mud, rock, sand and shingle.
The USV moved predictably out to sea on a long straight line and then returned to conduct a traditional lawnmower survey pattern typically used in mine countermeasures (MCM). The drift between the estimated SPRINT-Nav position and the actual GNSS RTK signal never exceeded the 0.01% error relative to distance travelled within the specification, proving that AUVs and ROVs can find their way, with SPRINT-NAv technology. No other COTS system or product matches this performance.
L3Harris takes USBL-aided AUV navigation to the next level
Ultra-Short BaseLine (USBL) aided navigation helps autonomous underwater vehicle (AUV) operators to ensure accurate mission outcomes. That’s why an L3Harris Technologies AUV Systems’ customer chose our Mini-Ranger 2 USBL system and AvTrak 6 for their Iver3 AUV. Read how AUV Systems decided to take the integration, with a third-party inertial navigation system (INS), to a deeper level.
The challenge
AUVs are playing an ever-greater role in the naval warfare playbook. Their ease of mobilisation is making them a go-to technology across survey, security and mine countermeasures. But navies still want accurate positioning and look to USBL-aided navigation to support their AUV and unmanned underwater vehicle (UUV) operations.
Using USBL position aiding to support underwater vehicle inertial navigation is key way to underpin accurate vehicle operations, reduce errors margins and improve efficiency. Regular, accurate position updates from a USBL system ensure the vehicle’s INS maintains accuracy, which can be critical in challenging environments.
This is just what a customer of L3Harris wanted. The customer chose our Mini-Ranger 2 USBL positioning system to aid the third-party INS on their L3Harris Iver3 AUV. The customer had already used Mini-Ranger 2 with another UUV and had been impressed with its performance and ease of use.







The solution
Mini-Ranger 2 is the ideal USBL system for coastal operations, supporting high-elevation tracking of up to 10 targets simultaneously down to 995 m water depth (extendable to 4,000 m), as well as data harvesting. It offers performance without the cost and complexity of a deepwater USBL system. To provide INS aiding on their Iver3, L3Harris’ customer chose to integrate our AvTrak 6 OEM Nano into their Iver3.
AvTrak 6 OEM Nano is the smallest variant of our AvTrak transceiver, designed for use on small underwater vehicles. It combines the functions of a transponder, transceiver and telemetry link, enabling communications, tracking and USBL aiding for subsea robotics. It’s also based on our 6G hardware platform, which means it’s interoperable with all our USBL, LBL and INS systems. This provides flexibility, but also performance enhancement, for example when combined with a Sonardyne INS.
USBL-aided navigation with a third-party INS – not a problem
Although L3Harris AUV Systems was only tasked with integrating the AvTrak 6 OEM, it decided to go a few steps further, making sure it spoke the right language as the third-party INS. Specifically, that meant making sure the AvTrak 6 OEM Nano would be able to send out a PSIMSSB telegram, instead of our proprietary SPOS, to the vehicle’s INS. Our engineers here at Sonardyne were able to support this change, simplifying the integration for the L3Harris AUV Systems team.
AvTrak 6 OEM Nano is designed with no housings, so that it’s easy to install for vehicle integrators. However, our engineers also provided the AvTrak 6 transducer on a special Iver3 mounting post design, so it was easy to plug and play into the Iver3. This is now available for the Iver3 vehicles going forward, as standard.
Track up to
0
targets simultaneously
Down to
0
m
water depth
Extendable to
0
m
water depth
The results
Following integration, L3Harris AUV Systems carried out successful performance testing, validating the ability of the Mini-Ranger 2 to aid the third-party INS via our AvTrak 6 OEM Nano. The team at AUV Systems was also impressed with our Ranger 2 software, allowing them to easily visualise where the Iver3 was subsea both relative to the vessel and its absolute positioning.
“The support from Sonardyne’s engineering team, applications group and the Sonardyne Inc. team has been a great bonus to this project for us and our client. Because of this support, we were able to go ahead and perform a full integration and validate the performance, which more than met our expectations. Aiding an AUV INS with a USBL is now a real customer requirement and through Sonardyne we’re able to offer this on our Iver3 vehicles.” – Morgan Eash, Project and Applications Engineering Manager – L3Harris AUV Systems.
Deeper integration, further improving performance
What’s more, L3Harris is now also exploring deeper integration to allow the vehicle to utilise the AvTrak 6’s diagnostics capability. By providing the vehicle with information of the acoustic environment the vehicle’s autonomy could make decisions to adjust the AvTrak 6 OEM Nano’s power and gain settings to improve acoustics without a human in the loop.
Using Mini-Ranger 2’s optional Robotics Pack software, the customer also has the option to track up to 10 vehicles on one common interrogate, providing absolute position of all ten vehicles and the surface vessel to each vehicle. This allows for better situational awareness for each vehicle enabling swarms.
Get in touch if you would like to know how will can support your AUV and UUV operations.
Long-endurance AUV development with shallow water simplicity
Developing large, deepwater and long-endurance autonomous underwater vehicles (AUVs) isn’t a challenge for the feint hearted. But with the right approach to USBL-inertial systems, it’s a task that can be made simpler, without having to dive straight in at the deep end.
The challenge
That’s the approach that Anduril Industries has taken for its large displacement unmanned underwater vehicle (LD-UUV) vehicle, the DIVE-LD. It’s a rapid development programme that has included support from the Defense Advanced Research Projects Agency (DARPA) and technology partnerships with organizations including the Center for Marine Autonomy and Robotics at Virginia Tech.
Deepwater capability, shallow-water USBL-inertial test bed
The DIVE-LD is targeting littoral and deepwater survey, inspection and intelligence, surveillance, and reconnaissance (ISR). To meet these tasks, the 1.2 m-diameter, 5.8 m-long AUV has been designed to operate in down to 6,000 m water depth, traveling at 2-8 knots and covering, in a single mission, nearly 600 km.
To hone the vehicle’s systems, Anduril wanted to be able to conduct testing in its home waters. They already have one of our Ranger 2 Gyro USBL (Ultra-Short BaseLine) systems for full ocean depth positioning on vessels of opportunity. But they wanted something for positioning in just 6 – 20 m water depth that they could quickly set up on small coastal boats or even RHIBs.






The solution
The company, which recently acquired Quincy, Massachusetts-based underwater robotics innovator Dive Technologies, chose our Micro-Ranger 2 USBL system.
It’s a perfect fit. Micro-Ranger 2 is portable; everything you need comes in one, medium-sized IP67-rated ruggedised case, complete with its own 10-hour rechargable power supply. It’s also easy to set up and use from any waterside location, with Wi-Fi and ethernet connection to your laptop. It is able to track up to 10 targets out to 995 m range, including in shallow waters, thanks to our Wideband digital signal architecture. It’s also available with an integrator kit for those wanting to both track and communicate with targets, whether that’s divers, ROVs or even large displacement AUVs!
For Anduril, it ticked all the boxes for helping develop their navigation techniques and to implement USBL aiding while testing in areas with less than 20 m total water depth.
Combining USBL-inertial systems
What’s more, the DIVE-LD already has our highest grade hybrid acoustic-inertial instrument, SPRINT-Nav X, and our AvTrak 6 combined transponder, transceiver and telemetry instrument onboard. This allowed for seamless integration with Micro-Ranger 2, thanks to them all being built on our common hardware platform, 6G. All equipment with 6G hardware talks the same language. This gives the user added flexibility of working with various transponders, or in this case topsides, to get the job done.
DIVE-LD
0
kg
weight in air
Up to
0
days
endurance
0
m
depth rating
The results
Tim Raymond, founding engineer at Dive Technologies and now Chief Engineer at Anduril, says, “Micro-Ranger 2 allows us to deploy on almost any vessel while performing shallow water AUV testing. At the same time, it’s still capable of providing quality USBL positional aiding to the AUV, despite the small form factor and challenging acoustic environment.
“This system has already allowed us to develop navigation techniques and implement USBL aiding while testing in areas with less than 20 m total water depth, giving us high confidence in the capabilities of our DIVE-LD’s onboard software and aiding systems, prior to deployment in more austere environments where USBL aiding is critical for AUV navigation.
“The ability to rapidly deploy on almost any vessel and test integration and implementation of USBL aiding systems, without the overhead of a large host vessel and deployment into deep water, allowed us to develop USBL aiding capabilities for the DIVE-LD on an extremely tight schedule and with very low cost to test and validate.”
Are you developing an AUV or UUV? Get in touch to find out how we can support your development programme, no matter how shallow or deep you want to go.
Underpinning USV navigation; ensuring survey data quality
Uncrewed surface vehicles (USVs) are now a regular sight in our coastal waters, across energy, defence and ocean science. It’s essential we ensure their navigational and situational awareness. Find out how we’re ensuring robust USV navigation, even when traditional navigation aids drop out.
The challenge
Uncrewed surface vessels (USVs) are fast becoming a standard tool in the box across the defence, energy and science sectors. Whether it’s for mine countermeasures or offshore wind farm site characterisation surveys, they’re proving to be valuable, low footprint and low logistics platforms for an increasing array or operations.
ut USVs rely on uninterrupted GPS or GNSS signal updates to inform their situational awareness, safe navigation and to reliably position any data they’re gathering. Loss of satellite-based timing signals needed for navigation and positioning can occur in ports and harbours around tall structures or close to cliffs or inside fjords, where GPS or GNSS receivers may not have a clear line of sight with the sky. It can also happen in offshore wind farms and through deliberate signal jamming or degrading of performance, known as spoofing.
Plugging the gaps in USV navigation
When this is a risk, alternative navigation sensors and instruments must be considered – otherwise USVs need to be remotely piloted, adding expense and risk to over-the-horizon operations. This was a challenge identified by the UK’s Defence Science and Technology Laboratory (Dstl).
Dstl saw a need to aid autonomous vehicle operations in challenging environments. So, via the UK’s national Defence and Security Accelerator (DASA), the Autonomy in a Challenging Environments competition set out to address factors that affect the military effectiveness of current autonomous technologies – and we were one of the companies chosen to help solve this challenge.






The solution
We worked with USV manufacturer SEA-KIT to take sensors already used for unmanned and autonomous underwater vehicle (UUV/AUV) navigation and tested them on one of their USVs. Specifically, we took our market leading SPRINT-Nav hybrid inertial navigation instrument and integrated into a SEA-KIT X class USV. We then tested it against local real-time kinematic (RTK) GPS positioning.
Acoustic-inertial navigation, in one
SPRINT-Nav is already proven as a reliable navigation instrument for autonomous and uncrewed underwater vehicles (AUV/UUVs), which operate in what is effectively a GPS or GNSS denied environment.
It was designed to create a “best of all worlds”; an all-in-one acoustic-inertial sensor that replaces the need for a separate Doppler velocity log (DVL), pressure sensor and INS/AHRS, saving cost, cabling and integration challenges. By tightly integrating these separates, SPRINT-Nav delivers class-leading performance. With the addition of SPRINT-Nav Mini, that’s also available in an even smaller and lighter package.
0
km
mission
0
hours
Over
0
m
swell
Over
0
%
roll
The results
The test environment for our SPRINT-Nav onboard the SEA-KIT X was in Plymouth Sound. This is a very busy marine environment. A USV without a reliable GPS signal is not only dead-in-the-water, it’s also a danger to others. In addition, without reliable navigation its payloads will lack the situational awareness to be effective.
To test SPRINT-Nav in this environment, we planned a series of runs over different seafloors at different heights from the seafloor. In essence we tried to stress the sensors on board to observe if the system would perform to spec.
Stress testing SPRINT-Nav as a USV navigator
We ran these runs many times, but one particular run was a great example of the system’s performance. This mission ran for more than 13 hours and covered 87 km. During the run, we had a lot of swell. Fortunately, because we integrate our SPRINT INS (complete with Honeywell ring laser gyro-based AHRS), with our Syrinx DVL in SPRINT-Nav, we were able to compensate for motions.
To give the system as difficult scenario as possible, we ran on an almost straight line as far away from port as possible. So, essentially, we are dead-reckoning for a prolonged period of time, without absolute references.
Success: <0.01% of distance travelled
The result? The peak error was below 0.01% of distance travelled when furthest from origin (30km away), rising to 0.016% over the 87km travelled. On the way back, we also ran a lawnmower pattern typical of mine countermeasure (MCM) missions or typical surveys. By integrating SPRINT-Nav onto a USV, we showed we can provide a continuous and resilient navigation solution in denied environments.
Since the trials, SPRINT-Nav and SPRINT-Nav Mini have both been selected for and integrated onto multiple additional USV platforms, including Ocean Infinity’s Armada Fleet and a hybrid surface and underwater uncrewed platform.
*The competition Autonomy in a Dynamic World competition was funded through the MOD’s Chief Scientific Adviser’s Research Programme’s Autonomy Incubator project that aims to: Identify and develop underpinning research and technologies to support the development and fielding of unmanned systems across defence which may be matured through the DSTL Autonomy Programme and other Research and Development programmes.
Bringing special order accuracy to small diameter AUVs
L3Harris has armed its Iver3 AUV with Special Order survey navigation capability – thanks to our Mini-Ranger 2 Ultra-Short BaseLine (USBL) system and AvTrak 6. Find out how – and how it will help cut offshore wind farm survey costs.
The challenge
Demand for underwater surveys in coastal waters as part of the offshore wind life cycle is at an all-time high. There’s little sign of that demand falling, thanks to a global shift to renewable energy. But surveys come at a cost.
To keep costs down, surveyors are looking at innovative ways to survey more seabed more efficiently using smaller AUVs that reduce operational costs by requiring smaller vessels and fewer people and reducing their overall carbon footprint.
This includes International Hydrographic Organization (IHO) classified Special Order standard surveys, which are often specified for pre- and post-surveys underwater power cables and UXO surveys.
To meet navigation requirements, Special Order surveys in shallower waters tend to require ship-mounted sensors, to achieve the absolute positional accuracy required (using the vessel’s RTK/GNSS position).
In deeper waters, heavier, larger diameter AUVs are used. Because they rely on a DVL and an inertial navigation system (INS) for their navigation, they also must be supported by large vessels.
But what if you could perform Special Order surveys in shallower coastal waters with smaller low-cost AUVs, reducing your reliance on large vessels, reducing logistics, emissions and operational costs?
This was the challenge set by customers of L3Harris who were keen to find ways to use their Iver3 AUV for Special Order surveys.
Specifically, they set out to test if USBL-aiding at high enough accuracy for Special Order surveys could be achieved within the size, weight and power limitations of a smaller, light weight AUV platform, such as the 5.8 in-diameter Iver3.
If it could, it would allow underwater run-times of more than eight hours, and a new paradigm in lower operational cost coastal surveys.
The solution
L3Harris had already used our Mini-Ranger 2 for USBL aiding an iXblue Phins INS, via one of our AvTrak 6 OEM Nanos, on one of its Iver3s on a separate customer project. Read more here.
Mini-Ranger 2 is the ideal USBL system for coastal operations, supporting high-elevation tracking of up to 10 targets simultaneously down to 995 m water depth (extendable to 4,000 m), as well as data harvesting. It offers performance without the cost and complexity of a larger deep water USBL system.
At the heart of the system our HPT 3000, a highly capable surface deployed USBL transceiver which is optimized for performance in shallow water, high elevation and long lay back operating scenarios, as well data telemetry.
To provide INS aiding, L3Harris’ customer chose to integrate our AvTrak 6 OEM Nano, with a remote transducer, into their Iver3.
AvTrak 6 OEM Nano is the smallest variant of our AvTrak transceiver, designed for ease of integration on smaller underwater vehicles. It combines the functions of a transponder, transceiver and telemetry link, enabling communications, tracking and USBL aiding for subsea robotics. It’s also based on our 6G hardware platform, which means it’s interoperable with all our USBL, LBL and INS systems. This provides flexibility, but also performance enhancement, for example when combined with a Sonardyne INS.
As in the earlier project, the AvTrak 6 was programmed to speak the right language to the third-party IXBLUE Phins INS, by sending out an APOS PSIM SSB telegram, instead of our proprietary SPOS. The AvTrak 6 transducer was also supplied on a special Iver3 mounting post design, to make it easy to plug and play into the AUV – and any other Iver3, for that matter.
Mini Ranger 2 was pole-mounted to the support vessel with hemisphere GPS for topside absolute positioning.





The results
L3Harris ran a <5 km-long survey, with six 800 m legs, in challenging <20 m water depth in Narraganset Bay on the north side of Rhode Island Sound.
Real-time USBL-aiding improved the survey accuracy by upwards of 7 m on far end of survey legs through the turns. During the survey, real-time survey performance ranges up to 800m were tested with USBL position standard deviations ranging from 1 – 3 m.
In addition, using Mini-Ranger 2’s robotics pack, the L3Harris team were able to provide the vehicle with information of the acoustic environment, so its autonomy could make decisions to adjust the AvTrak 6 OEM Nano’s power and gain settings to improve acoustics without a human in the loop.
“The standard deviation on the USBL position fixes were accurate allowing real-time position updates to the INS. The ease of operation using the Mini-Ranger 2 topside to track and monitor environmental influences throughout the survey also added a layer of safety for monitoring the UUV.”
“This set up allows surveyors to meet Special Order navigation standards, which is a big deal for small unmanned underwater vehicles (UUVs),” says John Sloat, Application Engineering Lead, L3Harris. “The problem before has been that there’s not a lot of real estate inside smaller UUVs to house the onboard technology required for Special Order navigation capability in. But now they can.
“This capability adds a high level of survey efficiency by reducing the need to frequently surface for a position fix which increases the vehicles endurance, reduces the risk of vehicle entanglement or loss, and allows for larger areas to be surveyed. It also means they have real-time data vehicle positioning, which, when post-processed, could be improved even more. That’s really valuable to survey customers and we do see this as the cusp of a new UUV survey era,” adds John.
What was also hugely valuable to the L3Harris team was the support from Sonardyne’s experts.
“The level of support and service from Sonardyne has been exceptional,” says John. “We are very pleased. It’s been a fantastic experience at every phase of the integration we have done and that’s a big de-risk for us, having a partnership like this.”