SPRINT-Nav combines INS (inertial navigation system), DVL (doppler velocity logger) and a pressure sensor into a compact, single housing, providing an all-in-one navigation instrument for underwater and surface vehicles. At Sonardyne, we combine our SPRINT INS and Syrinx DVL alongside a high accuracy pressure sensor, to create the SPRINT-Nav system.
How does a SPRINT-Nav work?
The IMU (inertial motion unit) measures the vehicle’s orientation and acceleration whilst the DVL measures the vehicle’s velocity relative to the seabed or water column and the pressure sensor measures the vehicle’s depth.
To provide accurate and reliable navigation information, SPRINT-Nav uses a tightly coupled algorithm to fuse the data from these three sensors. The algorithm considers the errors associated with each sensor to produce a navigation solution that is more accurate than any one of the individual sensors could provide on their own. Special calibration is not required to be performed before or during the mission to SPRINT-Nav being pre-calibrated. This is because the SPRINT-Nav simultaneously runs two algorithms: an attitude and heading reference system (AHRS) algorithm and an inertial navigation system (INS) algorithm. The INS algorithm can instantly initialise from the AHRS algorithm, allowing SPRINT-Nav to be used immediately after being turned on.
It is also fast to initialise, even if the vehicle is in motion; this is due to the use of ring laser gyros in the IMU which are very accurate and stable gyros and are not affected by dithering- a small, high frequency vibration that can introduce errors in gyros.
How can SPRINT-Nav be used?
SPRINT-Nav has a wide variety of applications, here are some examples. For an ROV, SPRINT-Nav can be used for piloting and navigation as well as dynamic positioning and mid-water station keeping with sparse LBL. For all subsea survey operations, SPIRNT-Nav 300, 500 and 700 offer a range of capabilities to suit your needs. In addition to this, SPRINT-Nav Mini (the world’s smallest hybrid navigation system) is ideal for deploying on inspection class ROVs and small AUV platforms. For AUVs, SPRINT-Nav X achieves high navigational accuracy, which allows for long-endurance missions. For USVs, SPRINT-Nav can be deployed for control tasks in GNSS (global navigation satellite system) denied environments as well as aiding station keeping. SPRINT-Nav Mini can also be used as a dynamic positioning reference unit.
-

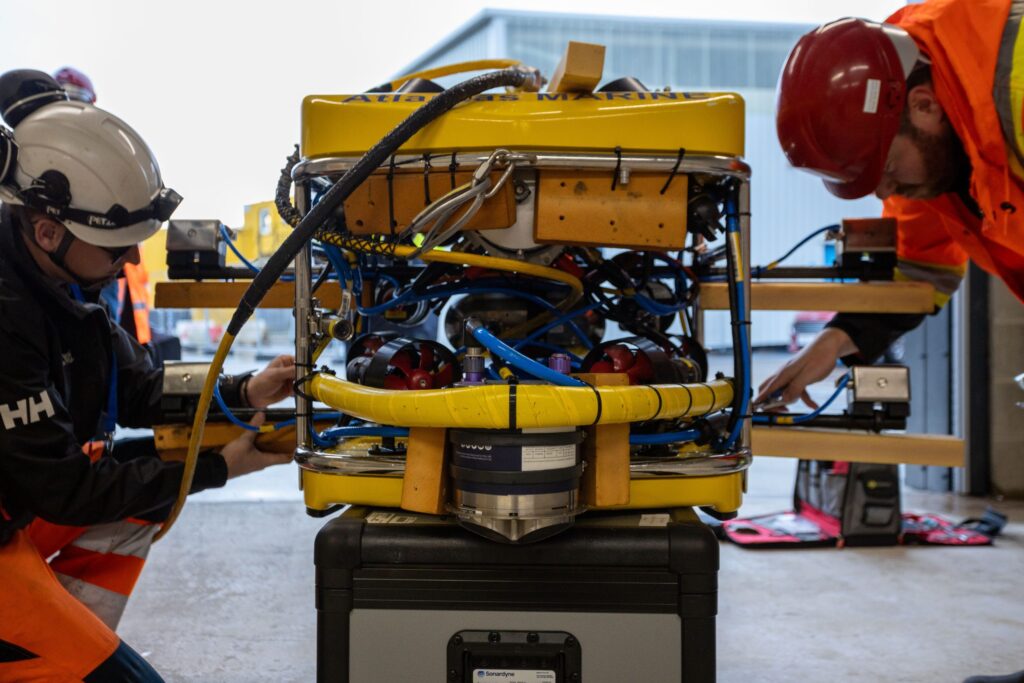
- SPRINT-Nav installed on work class ROV
-
- SPRINT-Nav Mini installed on an ROV
-

- SPRINT-Nav Mini and an inspection class ROV