Micro. For when good is good enough
Describing underwater ecosystems requires detailed information that can be accurately tied to specific locations. The impact of marine pests, litter, marine industries and other issues needs to be tracked over time with confidence. What’s more, the changeable nature of the sea and weather systems in coastal areas means equipment used for the assessment and monitoring of marine life, reef systems and sea fauna must be quick to deploy and simple to set up.
The challenge
Port Phillip Bay is home to a host of unique and iconic marine life and is one of the most diverse places on the planet for seaweeds and reef systems that support a diverse array of sponges and other invertebrates. It’s also shadowed by the city of Melbourne which has a growing population of nearly 5 million people and experiences particularly challenging conditions – the large embayment is exposed to strong winds and has periods of low underwater visibility.
To protect the Bay, the Victorian Department of Environment, Land, Water and Planning (DELWP) is implementing the Port Phillip Bay Environmental Management Plan 2017-2027 (EMP). The team at Fathom Pacific Pty Ltd have been tasked with carrying out studies and surveys in Port Phillip Bay to inform the decisions and recommendations made by the EMP.
To do this they need to create reliable models and maps, along with reports detailing the bay’s marine biotopes – areas that provide habitats for specific species – for the protection of the Bay to be effective. The data gathered has to be quantitative and accurately geo-referenced, and it must be gathered in increasingly cost-efficient ways.








The solution
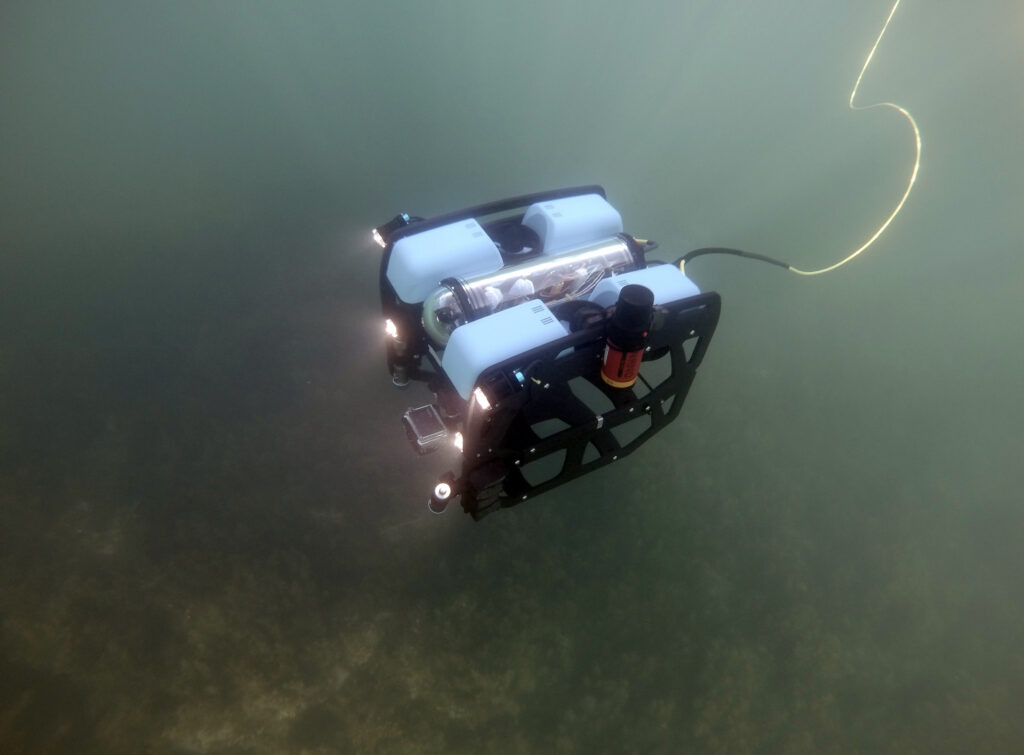
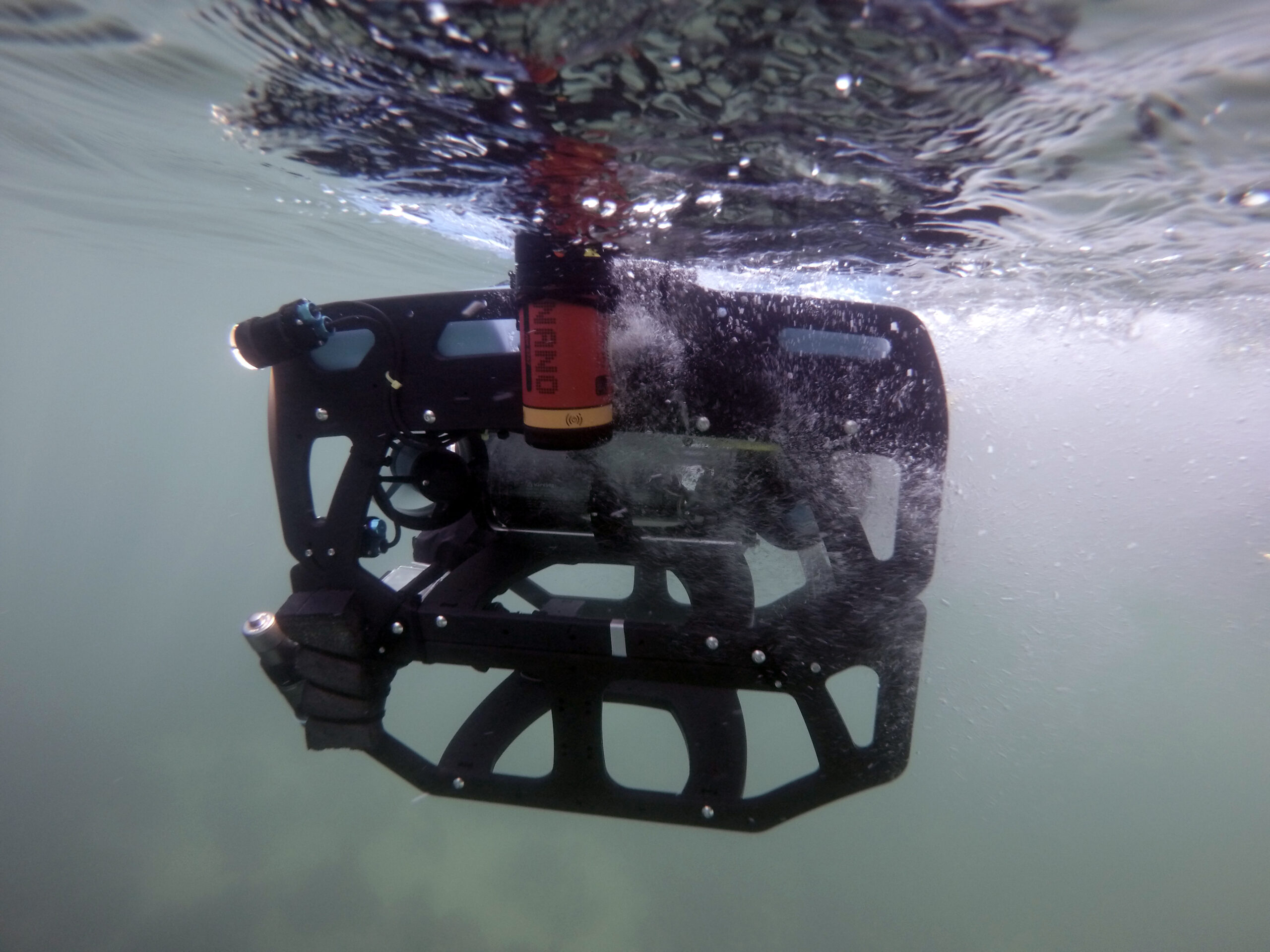
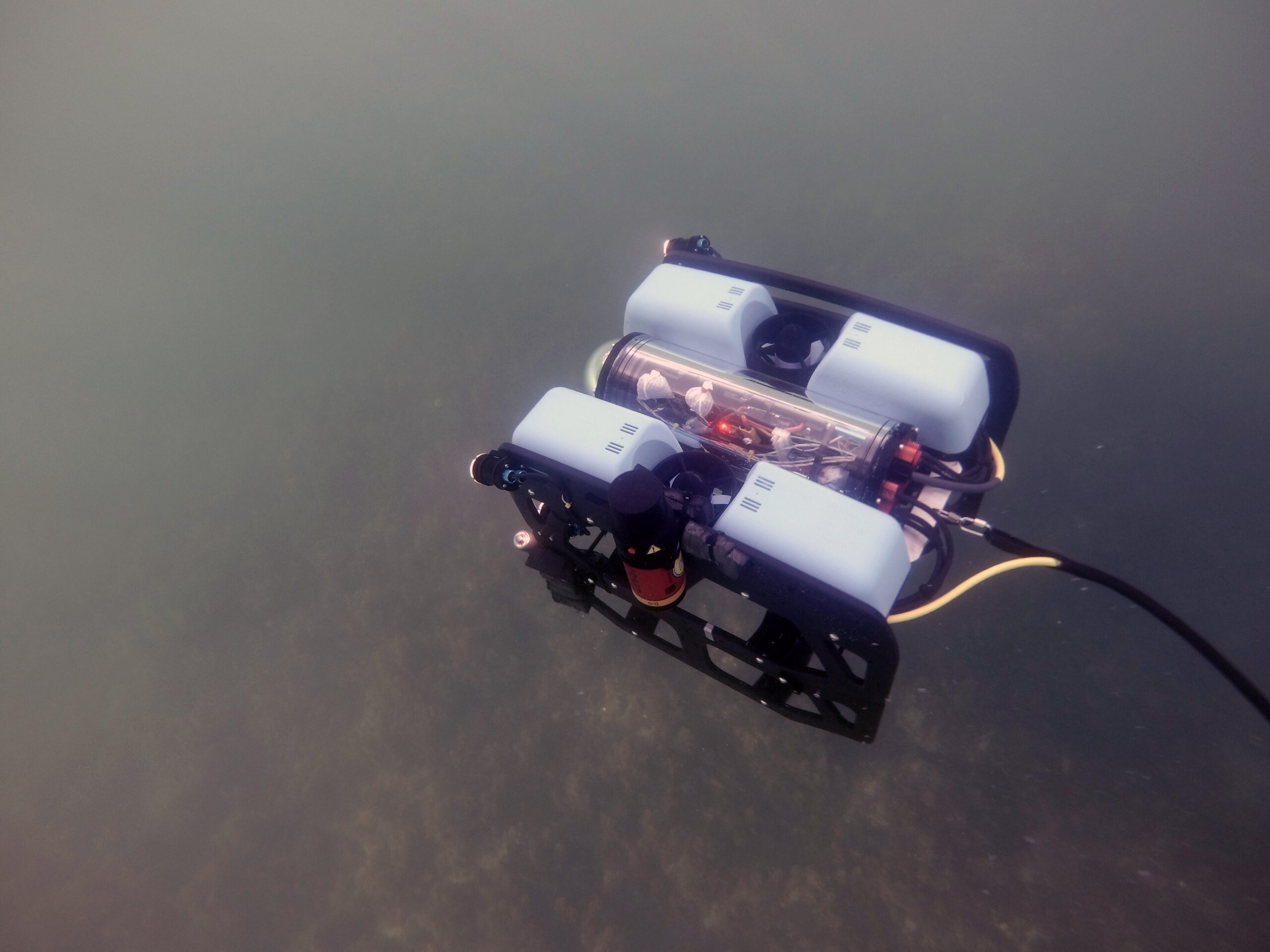
Firsthand ecological research and environmental monitoring are key building blocks of the models and maps needed for supporting the EMP decisions. The BlueROV2 remotely operated vehicle (ROV) from Blue Robotics and a Micro-Ranger 2 USBL from Sonardyne have enabled Fathom Pacific Ltd to capture incredibly detailed HD imagery from the camera they’ve mounted on it. Importantly, the USBL tells them exactly where it was recorded. If divers and other assets are in the water, it can track them as well.
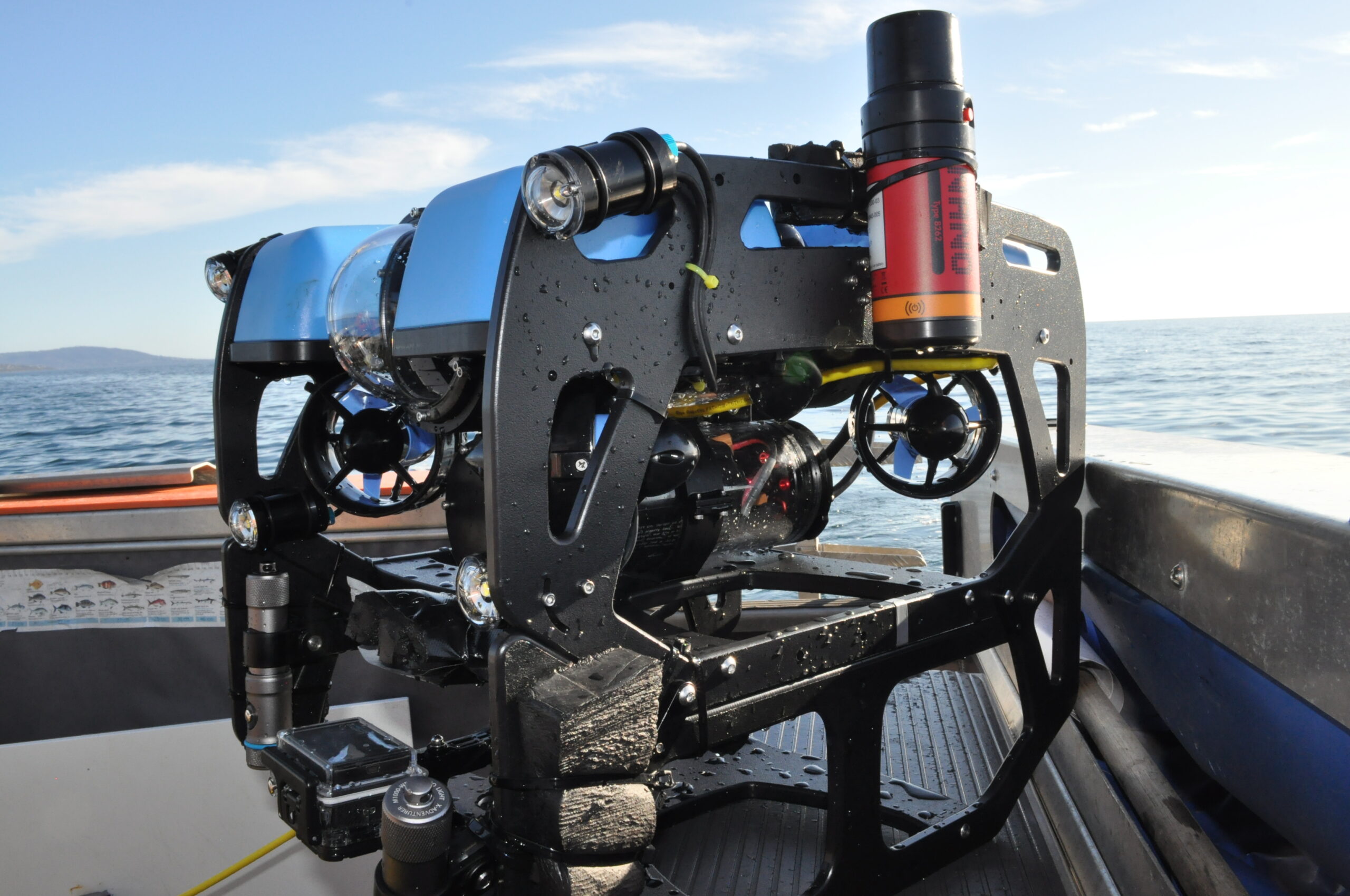
The Micro-Ranger 2 is extremely portable and easy to mobilise making it the ideal solution for small-boat coastal operations and short-notice surveys.
The MRT – the part of the system that communicates with transponders fitted to underwater targets – is so small and light, it has been mounted to the bottom of the stern diver ladder. The range and coverage of the transponder is impressive. Equally impressive are the Nano transponders, these can be strapped to the frame of the ROV or a diver’s tank without affecting balance or freedom of movement. The rechargeable battery lasts for a full day of operations.
Thanks to the instructional videos available on YouTube, the whole system was simple to install and calibrate. Once the software was set up and tested on the laptop, it was put straight to work supporting surveys throughout last winter and spring. The whole set up was often mobilised at very short notice, due to the unpredictable weather windows experienced in Port Phillip Bay.
The Micro-Ranger 2 system has accurately and consistently tracked the BlueROV2 in the bay’s shallow waters, even when it has been transecting some 50-100 m from the small MRT transceiver. This is important for the assessment of the bay’s biotopes during which images of the key structural and functional components of temperate reef and sediment biotopes are taken using the ROV mounted HD camera.
ROV transects typically operate in two modes. The first is a ‘video inspection mode’, detailing the canopy, sub-canopy, lower strata and turfing components and identifying the associated macrofaunal biodiversity. The second is a ‘still image mosaicking mode’, where fixed-altitude planar stills are taken to create biotope mosaics.
Using Micro-Ranger 2, Fathom Pacific Ltd were also able to place their analyses of reef biodiversity and biotopes into a spatial context by correlating the imagery data with real world coordinates. This means ground-truth data for biotope modelling can be provided, while also establishing biotope conditions and informing ecosystem models. Exactly the same locations can be visited time and again for future surveys.
The results
The investment in Sonardyne’s USBL technology is paying enormous dividends. Better monitoring of the Bay is enabling targeted and faster responses to issues like the spread of marine pests, loss of canopy-forming algae to urchin grazing, biodiversity loss, eutrophication, litter and impacts from marine industries. These are just some of the threats facing Port Phillip Bay’s marine systems that are now being curtailed.
Speak with one of our experts to learn how you can protect coastal environments with Sonardyne’s technology.
Underpinning the Indian Tsunami early warning system
Sonardyne Bottom Pressure Recorders (BPR) have been at the heart of the Indian Tsunami Early Warning System (ITEWS) since its establishment in 2007. Based on Sonardyne’s workhorse Compatt transponder, our BPR instrument was developed in direct response to the devastating 2004 Indian Ocean Tsunami.
The challenge
30% of India’s population (ca. 420 million) live on its 7,500 km long coast and are consequently highly vulnerable to devastating Tsunamis such as the one that occurred on 26th December 2004. This killed over 230,000 people in the Indian Ocean region, with 10,749 confirmed deaths in India and another 5,640 missing. While seismometers are an important component of Tsunami warning, only Bottom Pressure Recorders can detect the passage of an actual Tsunami. Indeed, Tsunami warnings based purely on seismic data have the potential to produce false alarms, which are costly in wasted evacuations and undermine public confidence.
The essential elements of a Tsunami Detection System (TDS) are:
1. The capability to detect a Tsunami – While a Tsunami may arrive at the coast many metres high, in open ocean they pass almost imperceptibly and may only be a few centimetres in height, although this elevation in sea-level can be maintained for as long as 20 minutes.
2. The functionality to provide this detection ashore with sufficient warning time – A Tsunami travels (in ms-1) at roughly the square root of the depth of the water (in m) multiplied by the acceleration due to gravity (9.81ms-1): In short, it travels faster in deeper water, so for example, in 1,000m of water it will be travelling at over 1,100 kmh-1. In India’s case, the Andaman-Sumatra and Makran subduction zones are located within a few hours Tsunami travel time of the Indian coastline
3. High reliability in delivering the detection information ashore – BPRs, as the name implies are deployed on the seabed, so rely on robust telemetry, which has to operate even in poor weather conditions continuously 24/7/365.








The solution
The catastrophic 2004 Indian Ocean Tsunami led Sonardyne’s founder, John Partridge, to initiate development of a variant of the Compatt 5 seabed transponder to detect a Tsunami passing overhead.
With an extensive track record in the oil and gas industry, this instrument was ideal to form the heart of a TDS requiring very high reliability. Nevertheless, integration of a Digiquartz pressure sensor to enable the Compatt 5 as a BPR, required significant development. This particularly involved reduction of the power required for continuous operation on battery power. Similarly, a new transceiver with low quiescent power, capable of long endurance deployment on a surface telemetry buoy, also had to be developed.
Development was so rapid that when India’s National Institute of Ocean Technology (NIOT) in Chennai, started looking for a TDS in 2005, it was ready for competitive field trial. Sonardyne’s solution was subsequently selected in 2006, leading to deployment of operational systems in the Bay of Bengal and Arabian Sea in 2007.
In normal operation the Digiquartz pressure sensor in the BPR continuously measures water pressure and this data is stored every 15 seconds. The pressure data is then acoustically transmitted every hour to the surface, where an acoustically baffled transceiver, mounted beneath a buoy, receives this data. The buoy is linked to NIOT’s Mission Control Centre (MCC) by satellite communications, so that not only can data be transmitted ashore quickly, but also the health of the BPR is remotely monitored and, if necessary, reconfigured.
Embedded in the BPR is the National Oceanic and Atmospheric Administration’s (NOAA) Tsunami detection algorithm, which compares each measurement to the predicted pressure [Figure]. This predicted pressure uses the previous 3-hour history to take account of tide, weather and temperature variation. Should the difference between the two exceed a programmable default threshold of 3 cm for two consecutive samples, the BPR switches into Tsunami Alert Mode, which then initiates a sequence of data transmissions for the next few hours.
Sonardyne’s Wideband acoustics are central to the functioning of the system, and with the subsequent replacement of the Compatt 5 with Compatt 6, Sonardyne’s latest TDS offering is equipped with the most robust and efficient wideband acoustic telemetry available.
Of India's population
0
%
live on its long coast line
Monitoring
24/7/365
The results
Soon after the first batch of BPRs were deployed, on the 12th September 2007, the system detected its first Tsunami, which was triggered by an 8.2 magnitude event off the coast of Sumatra at 04° 30’ S 101° 18’ E. How the Tsunami generated was tracked across three of the Indian Tsunami Buoys (ITB) is shown in the gallery.
Located between 1,760 – 2,300 km away, all three stations recorded the seismic ground wave arrival between 7 – 12 mins after the event started. Between 2 – 3 hrs later, the wave itself, which was less than 10 cm in height, passed over the three BPRs, indicating that it had travelled at between 740 – 800 km/h over this period.
Today, Sonardyne’s TDS continues to deliver bottom pressure and event data to NIOT, which is responsible for delivering sea-level data to the Indian Tsunami Early Warning Center (ITEWC) at the Indian National Centre for Ocean Information Sciences (INCOIS) in Hyderabad. In 2014, NIOT reported that system data availability had been 98.83%, with a Mean Time Between Failure (MTBF) of 1.62 years, noting that the majority of these failures were due to external impacts, including weather and human interference with the surface buoys, resulting in damage to surface communication and data systems.
A new world of multi-robot ocean exploration
The OECI’s Technology Integration Challenge made major strides in multi-robot operations, on the surface and underwater, unlocking ways to explore our ocean – and far more efficiently. Find out how and the role our acoustics played.
The challenge
Ocean exploration is costly. Operations involving single underwater platforms, such as remotely operated vehicles (ROVs) or autonomous underwater vehicles (AUVs), often take up an entire cruise. Even when multiple underwater robots can be accommodated on a vessel, only one tends to be deployed at any one time, due to the complexity involved in its deployment, operations and recovery. It makes ocean exploration expensive and limits how much science can be conducted on any one cruise. But what if uncrewed surface vessels (USVs) could be used, not just as force multipliers for mapping operations, but as a remote shepherd, coordinating multiple underwater vehicles, they would be able to operate entirely freely from a mother ship.
This was a key objective of the US’ Ocean Exploration Cooperative Institute (OECI) 2022 Technology Integration expedition NA139 on the Exploration Vessel (EV) Nautilus.
Enhancing ocean exploration through the use of remote and autonomous operations is a key objective of the OECI, a partnership between The University of Rhode Island, The Ocean Exploration Trust (OET), The University of Southern Mississippi, the University of New Hampshire (UNH), Woods Hole Oceanographic Institution (WHOI) and primary funding partner National Oceanic and Atmospheric Administration (NOAA) Ocean Exploration.
The expedition brought together OECI partner robots together with OET’s EV Nautilus for a ground-breaking technology demonstration in the Pacific Ocean during May 2022. These were:
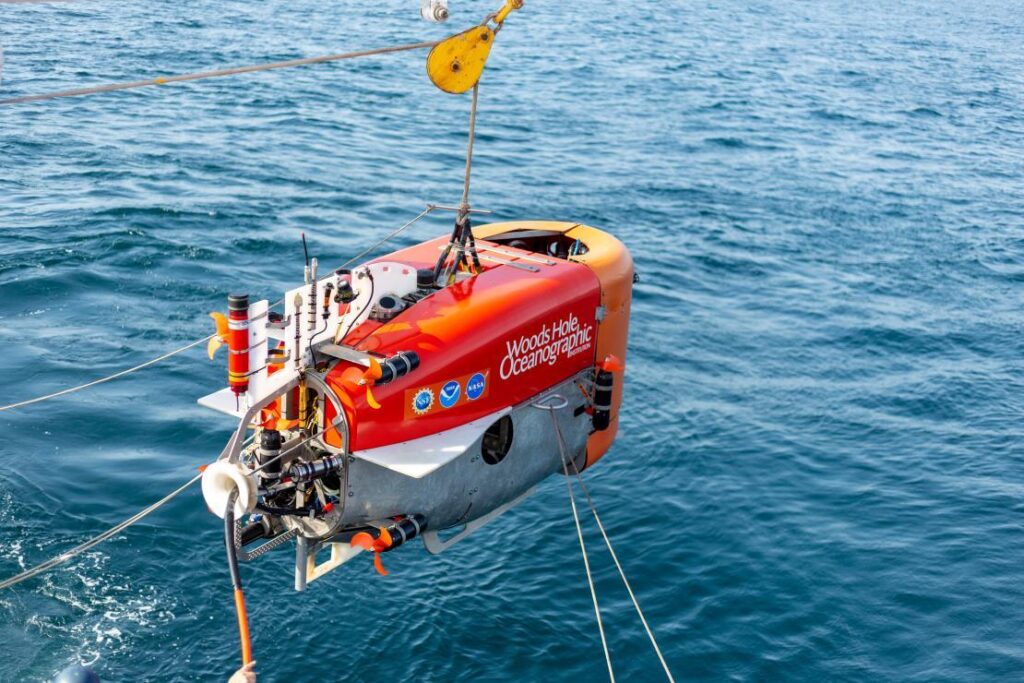
Mesbot – WHOI’s mid-water robot that is designed to image and sample plankton layers.
NUI – WHOI’s hybrid ROV-AUV, designed initially to work under ice, that can operate out to about 20km on a fibre optic cable for high data rate data, but can also continue to operate without the fibre link.
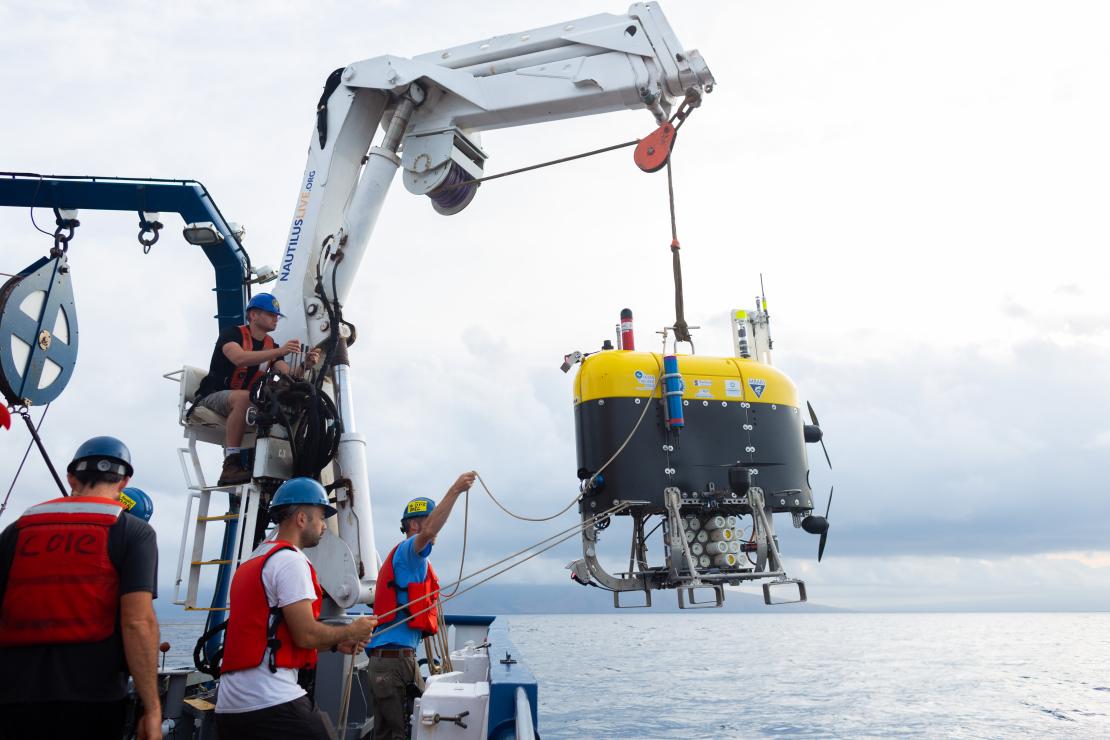
DriX – UNH’s 7 m-long USV capable of supporting a variety of payloads such as multibeam echo sounders, acoustic communications and tracking and surface communications.
Their goal was to have all three platforms operating together, sharing information and situational awareness and relaying their information, via the DriX, back to the EV Nautilus, enabling scientists onboard to remotely control subsurface operations up to 20 km away from the ship.
Key to meeting their goal was inter-vehicle communications, tracking and positioning.
The solution
The DriX used a marine broadband radio link to communicate with the RV Nautilus (and our HPT 3000) to track, position and communicate with (including providing navigation data) the Mesobot and NUI as part of our Mini-Ranger 2 Ultra-Short BaseLine USBL system.
The underwater vehicles Mesobot and NUI were fitted with our AvTrak 6 combined tracking, telemetry and control transponders. The EV Nautilus was also fitted with our Ranger 2 Gyro USBL system, which would have also be able to track, position and communicate with the Mesobot and NUI, if this had been required.
Mini-Ranger 2 is our mid-level USBL tracking system that’s also able to support communications with underwater vehicles. It can track up to 10 targets at a time, at ranges of up to 4,000 m (with an extended range option) and, with our Robotics Pack, enables command and control untethered underwater vehicles.
For the OECI team, it was this combination of communications and positioning – acomms and USBL – that offered the broadest possibilities to the mission, from a single system.
AvTrak 6 is our tracking, communications and relocation transceiver. It allows USBL aiding for your AUV from a surface vessel and robust telemetry for AUV to vessel and AUV-to-AUV communications.
Ranger 2’s Gyro USBL comes pre-calibrated, thanks to its perfectly aligned acoustic transceiver and built-in attitude and heading reference sensor (AHRS), so you don’t need to take the measurements otherwise needed to determine the alignment of the ship’s motion sensors to the acoustic transceiver.
This makes it a very a portable system that the OET can use on vessels of opportunity. On the EV Nautilus, it was fitted through the vessel’s moon pool.














0
robots
0
dives
Communications
0
km
range
The results
“This was a real first for us,” – Professor Larry Mayer, Director of the Center for Coastal and Ocean Mapping, University of New Hampshire.
Over the course of the 16-day expedition near the island of Oahu, off Hawaii, the team tested and demonstrated operational capabilities. Over 30 dives were performed, totaling 210 hours in the water.
The team established a common control system, based on the robot operating system (ROS) for the vehicles and then set out, each time proving out more and more capabilities.
First, they had DriX track and communicate with Mesobot, using Mini-Ranger 2. Because the DriX has GNSS data at the surface, this meant it could position the Mesobot in the real-world and relay this data back to the RV Nautilus.
Next, they sent commands, via the DriX to Mesobot, from EV Nautilus to open and close its samplers, as well as to move up or down or to the right or left as well as change speed through the water column.
But then the most exciting thing happened, explains Professor Mayer:
“Mesobot is designed to sample layers in the water column. But it doesn’t know where they are. DriX has a sonar (EK-80) that could see those layers. So we could get DriX sonar data back on the ship and in real-time see what’s called the scattering layer of plankton and command the Mesobot to go to that layer to sample it.
“Because Drix is circling above, it can actually see the Mesobot in the layer. This was a whole new world. Normally, Mesobot is sampling blindly. We could now direct it into the layer, know it’s in the layer and see if its entrance causes the layer to scatter. All these were unknowns before.”
The team were then able to repeat these activities with NUI, including using DriX to map the seafloor east of Maui and then relay a mission to NUI for further investigation. In addition, CTD data, as well as snippets of imagery and bathymetry were transmitted acoustically up to the DriX, using Mini-Ranger 2, and then via the radio link back to the Nautilus.
“By the end of the cruise we were able to have both vehicles in the water with the DriX circulating above, communicating with each of the vehicles, giving each other situational awareness, and the mothership, it was off do its own thing. I couldn’t have asked for a more successful cruise,” says Larry.
“We are really opening up a new world of multi-vehicle operations. In the old days, we would schedule a cruise and just use the Mesobot or schedule a cruise and just the NUI or an ROV. Even if they would all fit on one ship at the same time, you only use one at a time, so the $60,000 a day would be clicking away and you’re only doing a single science operation.
“Now we can do 2-3 science operations, the efficiencies are tremendous and it allows us to explore the seafloor, water column and surface all at once.
“The Mini-Ranger 2 system gave us the broadest base of possibilities with having both the acoustic communications and the positioning, USBL and acoustic communications, from the same system and that combined set of capabilities was so important to us.
“The standardization and ease at which we were able to send messages across from our programmers made it easy to use. The cooperativeness and responsiveness of the team at Sonardyne was also really helpful. They didn’t see it as disruption, they saw the possibilities.”
The expedition was funded by NOAA Ocean Exploration via the Ocean Exploration Cooperative Institute.
For more information and to watch other videos from Nautilus, click here.
Autonomous robots prepare to storm the ocean depths
Sonardyne were delighted to be part of the trials of a fleet of marine robots able to tackle complex offshore tasks as part of a ground-breaking project funded by Innovate UK, which is poised to change approaches to ocean exploration. Autonomous marine systems are being developed and deployed in increasing numbers. However, as maritime operations become ever more complex and expensive, and installed energy infrastructure increases in scale and distance from shore, there is a rapidly emerging need for more sophisticated multi-platform capabilities in the offshore renewable energy (ORE) market.
Squads of Adaptive Robots (SoAR) is a two-year collaborative research project, led by the developer of ecoSUB autonomous underwater vehicles (AUVs), Planet Ocean. The project kicked off in September 2021 and culminated this summer with full system testing at Smart Sound Plymouth on England’s south coast.
The SoAR team’s aim was to demonstrate how large-scale survey and exploration missions can be achieved by going beyond the limitations of individual AUVs. We worked alongside industry and academic partners; Planet Ocean, HydroSurv, the National Oceanography Centre (NOC), Royal Holloway University and the Offshore Renewable Energy (ORE) Catapult to develop advanced AI-driven mission planning, communications protocols for fleet coordination and significant improvements in underwater navigation and communications technology.
The trials simulated an offshore windfarm concession survey mission informed by a comprehensive business case analysis by the team at ORE Catapult.
The technology
The fleet-level autonomy engine developed by Royal Holloway, University of London served as the mission’s central nervous system, making real-time decisions and replanning when necessary due to factors such as inaccurate mission execution, vehicle faults, changes in the operating environment or the addition and removal of stations. The division of labour enabled by this approach showed significant promise in productivity gains made possible by robotics and AI.
The SoAR Communications Backbone, developed and released by the team at the NOC, acted as a central messaging system which enabled interoperability between the fleet-level autonomy engine, each vehicle-specific command and control system and any other sub-system requiring bi-directional communication. This was key to allowing the seamless introduction of different platforms and sub-systems in diverse combinations to suit a wide range of mission objectives.
We provided inter-medium communications via our AvTrak 6 Nano acoustic transceivers fitted to each AUV. This enabled simultaneous USBL tracking via a surface vessel and robust telemetry for AUV-to-vessel and AUV-to-AUV communications.
A small swarm of four ecoSUB AUVs, each fitted with an AvTrak 6 Nano acoustic transceiver, played a crucial role in rapidly assessing the underwater environment and conducting preliminary evaluations to identify targets of interest.
An Auto-Hover 1 (AH1) AUV, owned and operated by NOC, capable of exceptional precision in maintaining station and navigating vertically within the water column, and fitted with an AvTrak transceiver, was dedicated to close inspection tasks, enabling intricate and comprehensive examination of identified targets.
Our HydroSurv REAV-60 uncrewed surface vessel ‘Decibel’ assumed a pivotal role, serving as a crucial communications gateway to and from the AUV swarm. It was fitted with an HPT 3000 transceiver and ran our well-established Ranger-2 software on its topside, facilitating inter-medium communication and providing navigation support to the AUVs. Decibel was also equipped with various communications devices including 4G/LTE and Iridium satellite communication systems to enable communications between subsea, surface and the Autonomy Engine.
The deployed SoAR fleet was managed and controlled from HydroSurv’s shore-based Remote Operations Centre in Exeter, using 4G/LTE and Iridium communications.






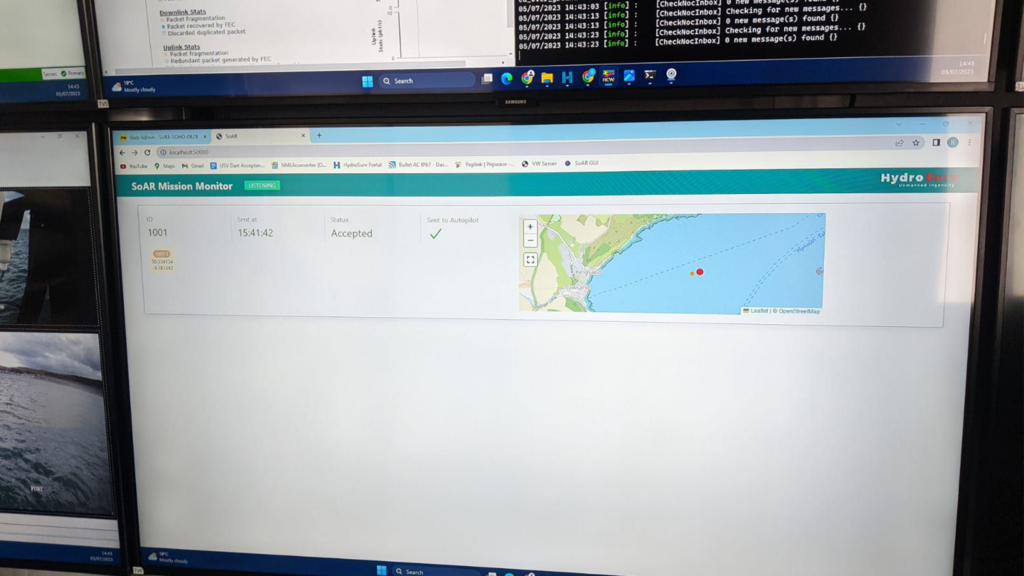








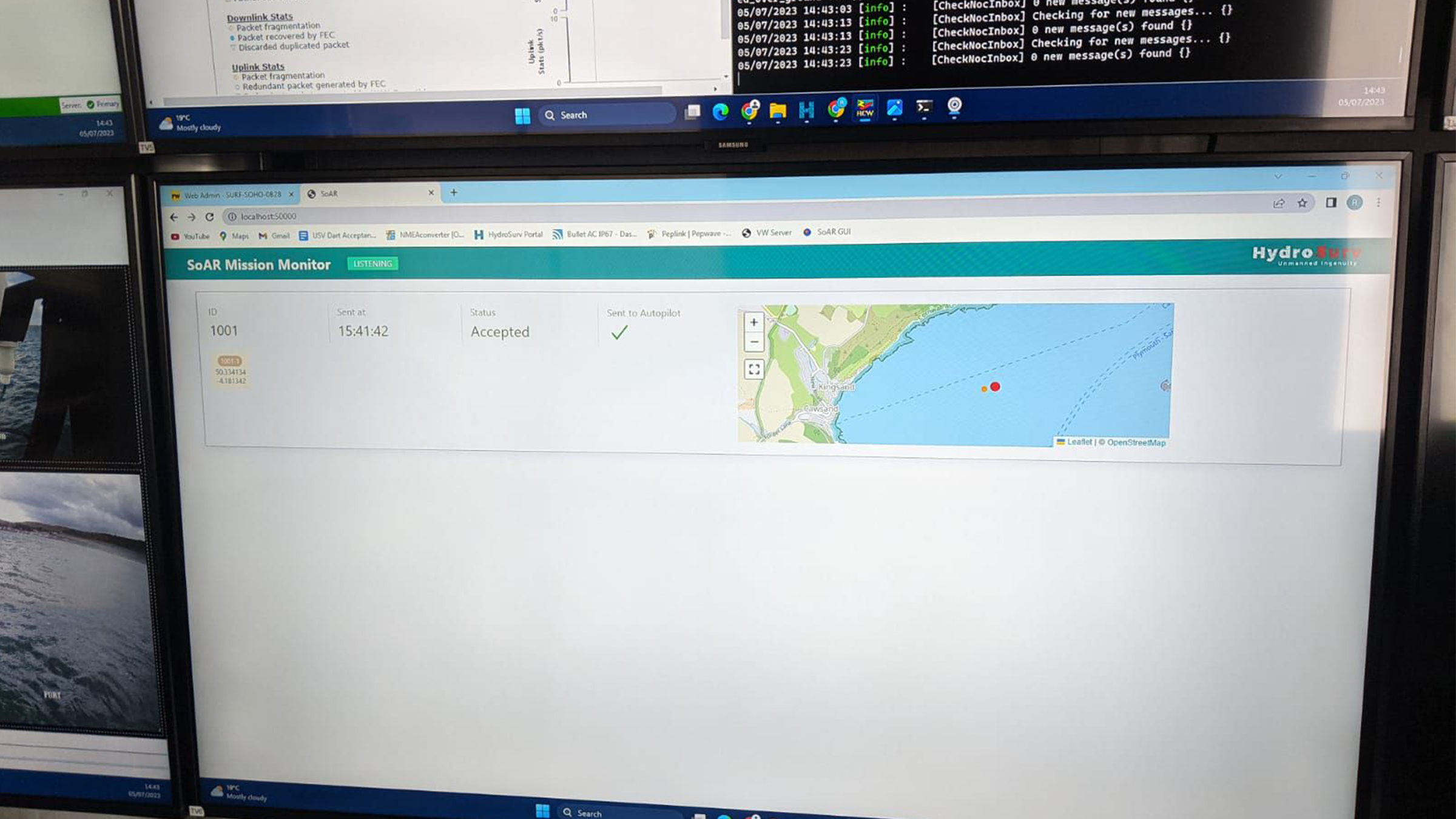


The results
The open-water trials successfully showcased co-ordinated missions designed, monitored and adapted in real-time by an intelligent “Autonomy Engine”. The trials involved several surface and underwater autonomous systems, with mission management conducted from a remote shore-based command and control facility.
SoAR has led to the introduction of several technological innovations, including advanced AI-driven mission planning, open-source communications protocols for heterogenous fleet coordination and a range of new and enhanced platform capabilities for both surface and sub-surface systems. The variety of small form factor robotic platforms involved in the project represented some of the best innovation in UK ocean robotics to date.
The SoAR concept is adaptable to various applications but strategically tailored to address the specific needs of the offshore wind sector, developing an approach that will offer new operating paradigms and substantial long term cost savings for offshore asset construction and maintenance compared to conventional methods.
SoAR received funding from the ‘Next Generation Subsea Technologies’ competition, a joint initiative supported by Innovate UK, the Net Zero Technology Centre and the Royal Navy.
Pinpointing Precision: Arctia chooses Sonardyne system for subsea surveys
When Finnish state-owned hydrographic services and icebreaking company Arctia need to accurately and reliably position their subsea survey equipment there is only one logical solution.
Arctia provide a wide range of services for Finland’s maritime industry including icebreaking, hydraulic engineering, planning and permit services, fairway maintenance and survey services, hydrographic services and research.
Their services all rely on precise subsea navigation and tracking, especially those using towed survey equipment. This is where Sonardyne come in, Arctia have chosen their Mini-Ranger 2 Ultra Short BaseLine (USBL) system with WSM 6+ transponders for their marine survey services.
Many of their marine surveys are conducted around offshore wind farms where teams of internationally certified hydrographic surveyors and shallow water experts provide tailor-made survey, analysing and planning solutions to meet even the most demanding of customer needs.
Mini-Ranger 2 is one of Sonardyne’s most popular USBL systems, chosen for its small size, value and dependable performance in all underwater environments. It’s the perfect choice for fitting to small survey vessels, moored barges and uncrewed vessels.








For Arctia, it is the perfect partner for towed hydrographic survey equipment such as magnetometers and sidescan sonars used as part of their survey services. With depth ratings of up to 1000 metres and able to operate in temperatures as low as -5 degrees Celsius, it’s ideal for the Baltic Sea and offers the opportunity to upgrade to other versions for depths up to 4,000 metres should Arctia and their customers operate at greater depths in future.
If you have a similar challenge in your subsea navigation and tracking operations, contact us to see how we can help.
Mapping the future for seagrass beds in Plymouth Sound
Seagrass beds are incredibly important ecosystems that offer a range of ecological benefits. Not only do they provide crucial habitats for a diverse array of marine wildlife, especially in coastal areas like Plymouth Sound, they can also store carbon, helping to mitigate the effects of climate change. These underwater meadows serve as nurseries for many species of fish in the early stages of their life, offering them protection and abundant food sources. Additionally, seagrass beds help to stabilise the seabed with their root systems, preventing coastal erosion and maintaining water quality by trapping sediments and nutrients.
However, despite their importance, locating and monitoring seagrass beds using traditional methods, such as survey boats, presents significant challenges. Seagrass typically grows in shallow waters, which can make it difficult for boats to navigate close enough to the shore to obtain accurate data. Traditional survey boats are often large and cumbersome, making them hard to manoeuvre in shallow or rocky areas. This limitation can result in incomplete or inaccurate assessments of seagrass distribution and health.
Furthermore, the process of using boats for surveying can be time-consuming and labour-intensive. It often requires multiple trips and extensive manual labour to map out the seagrass beds accurately. The visibility in shallow waters can also be poor due to water turbidity, further complicating the survey efforts and leading to potential underestimation of seagrass coverage.
Finding a solution…
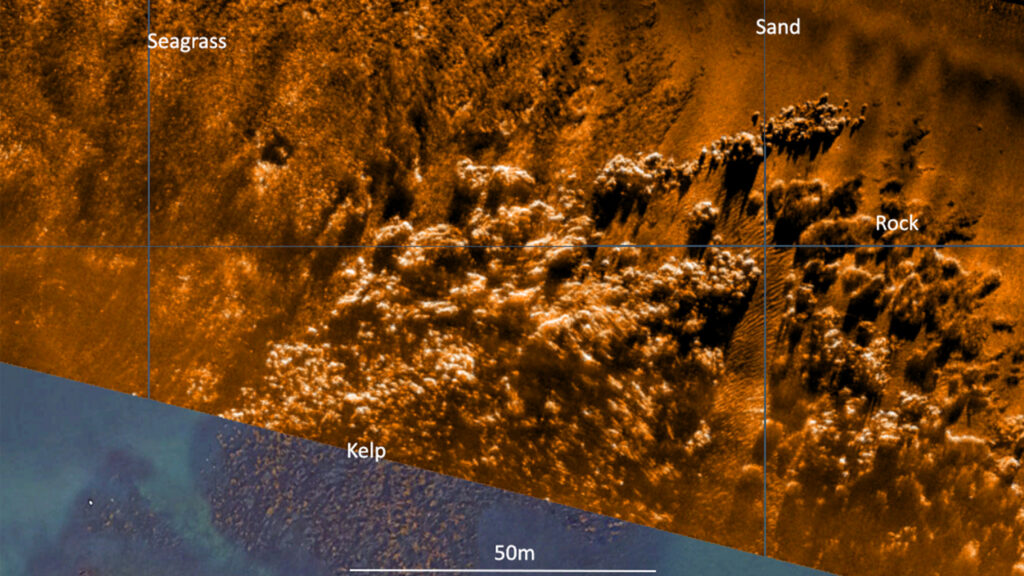
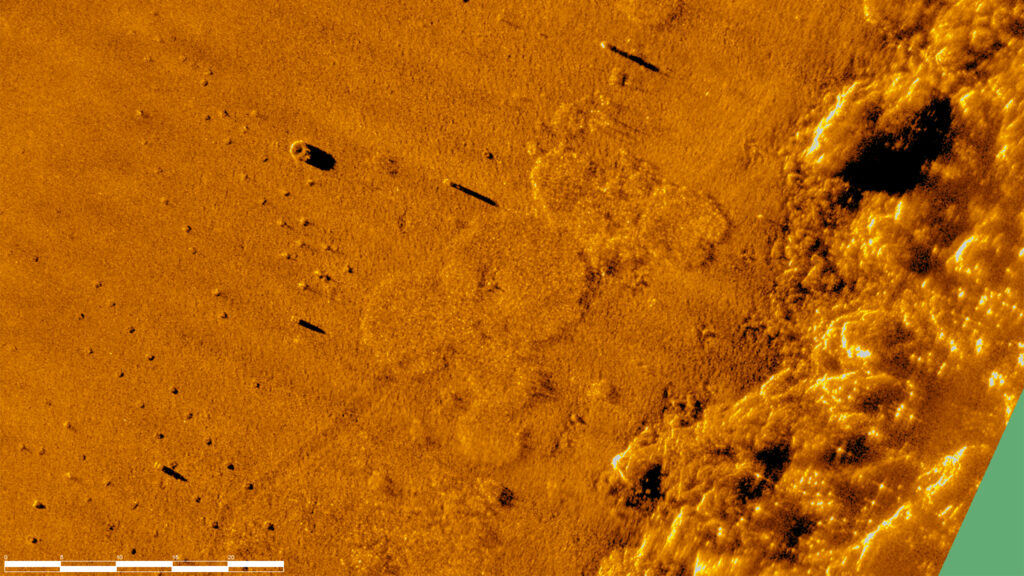
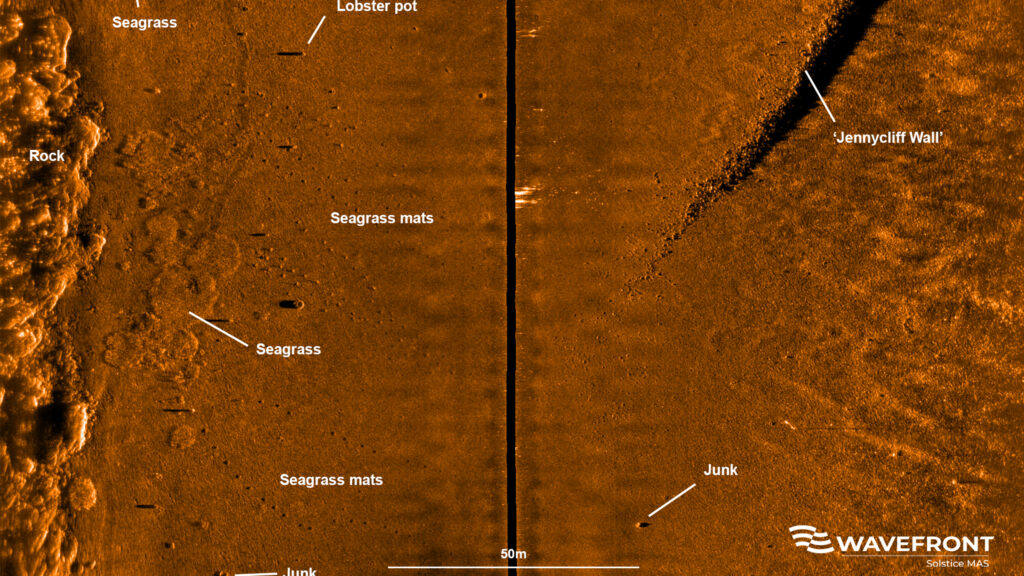
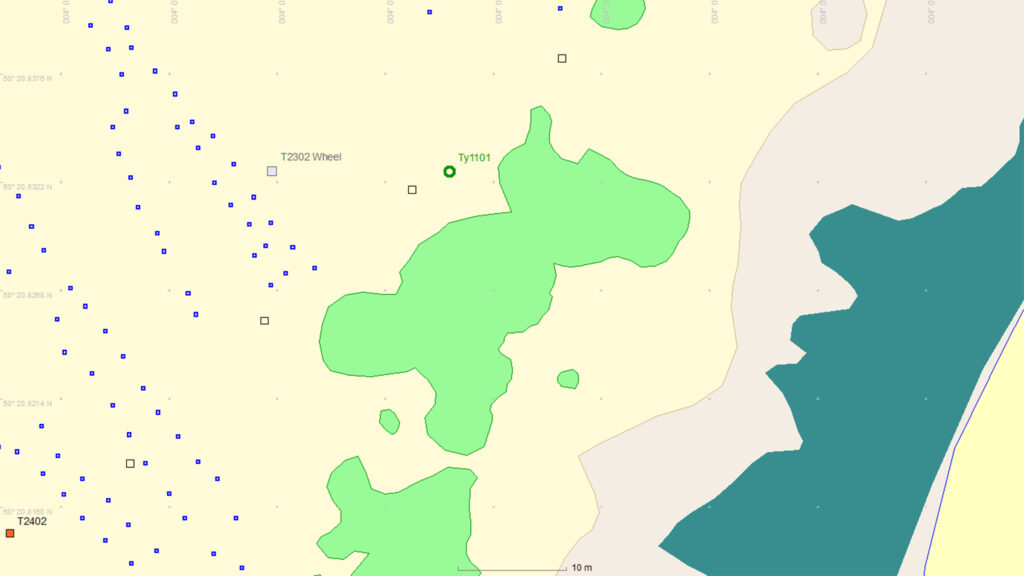
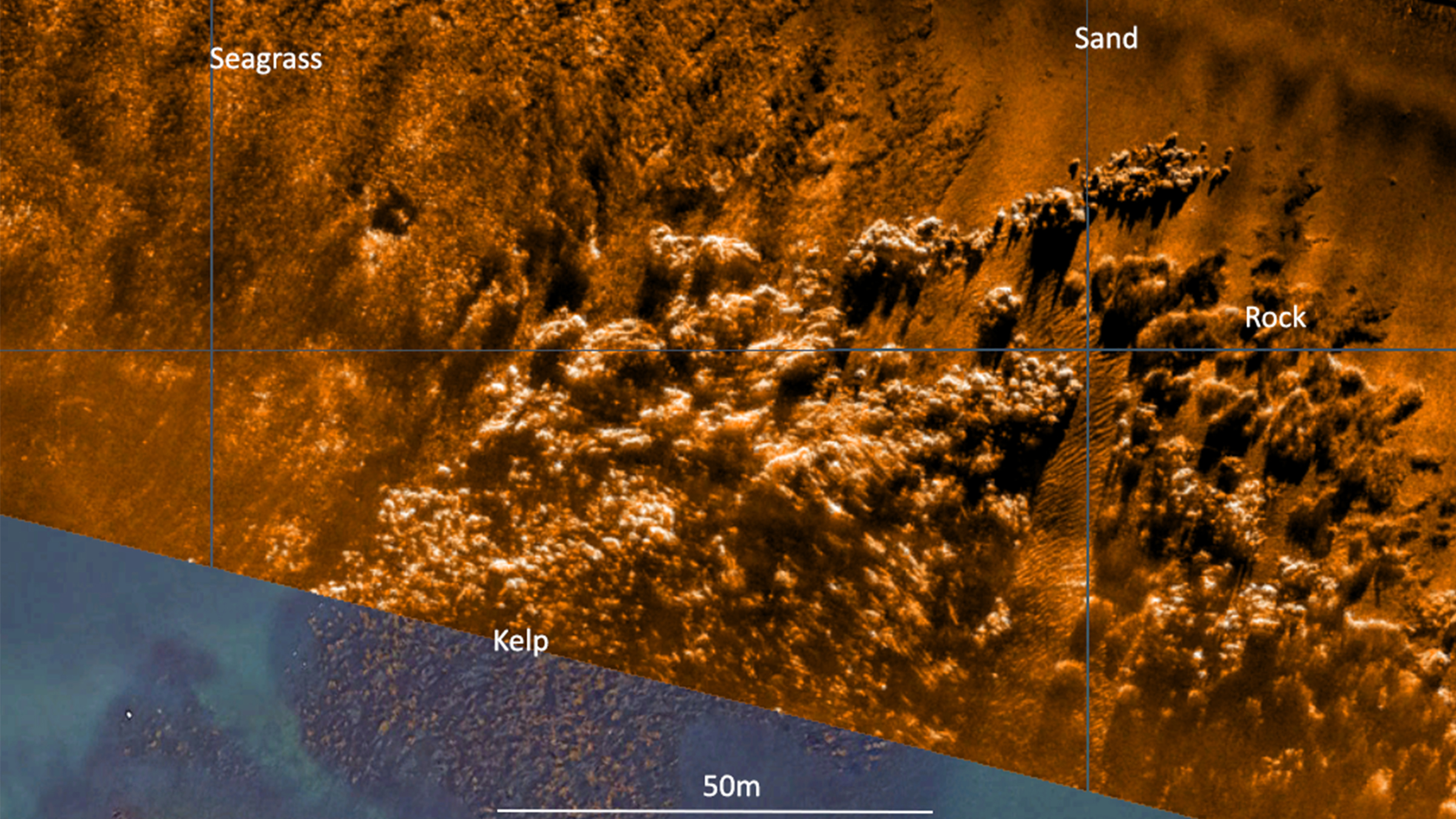
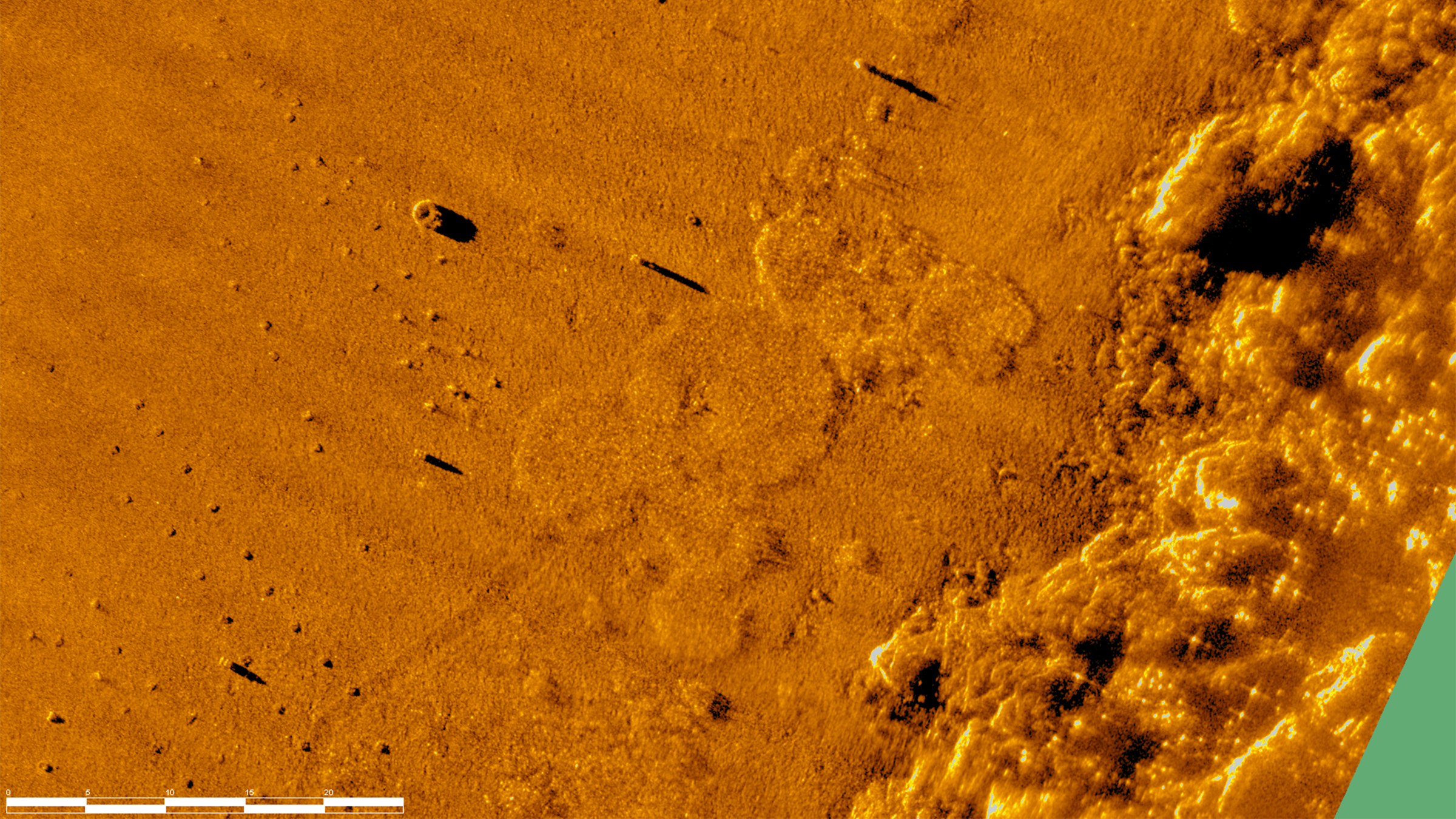
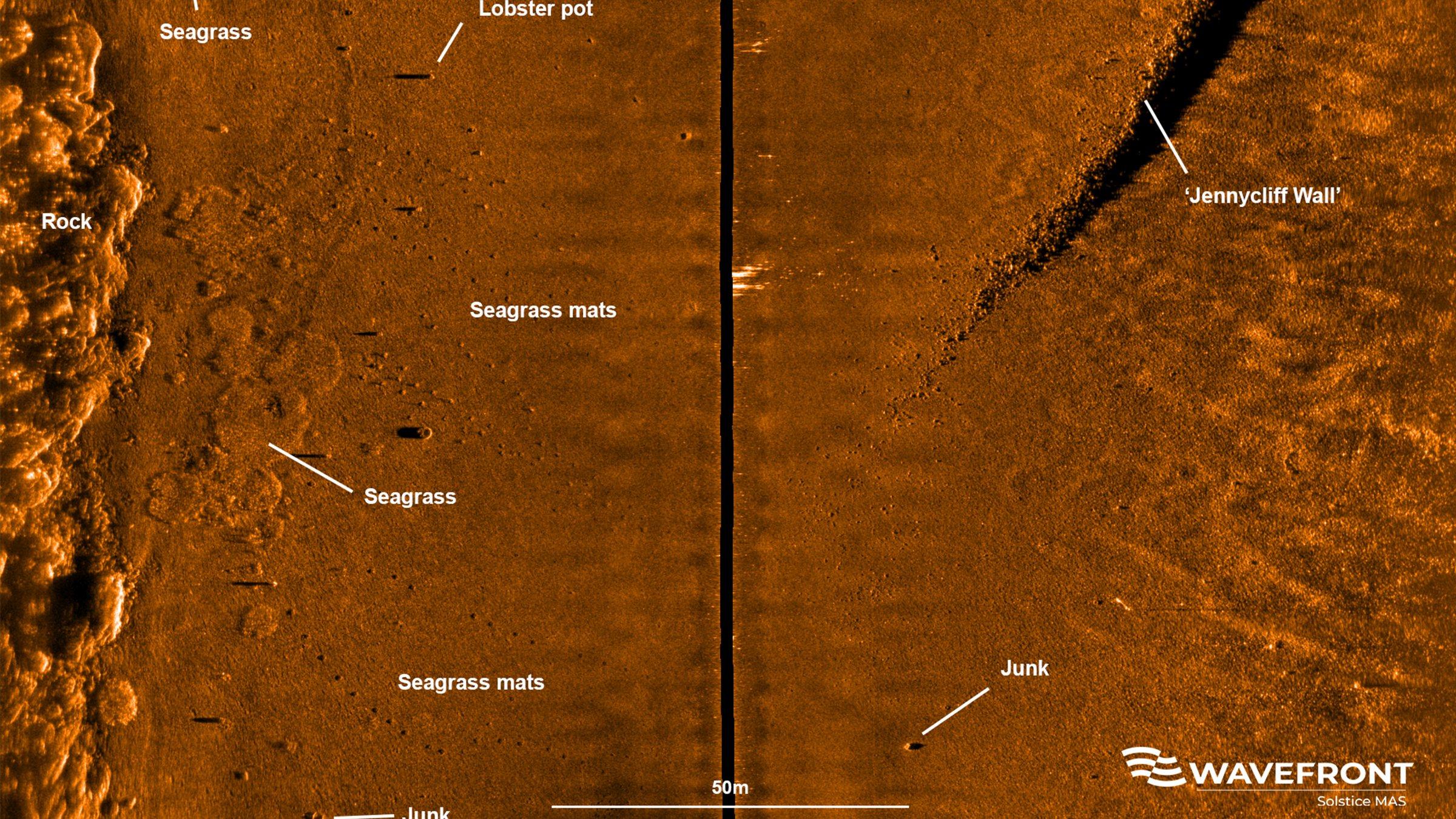
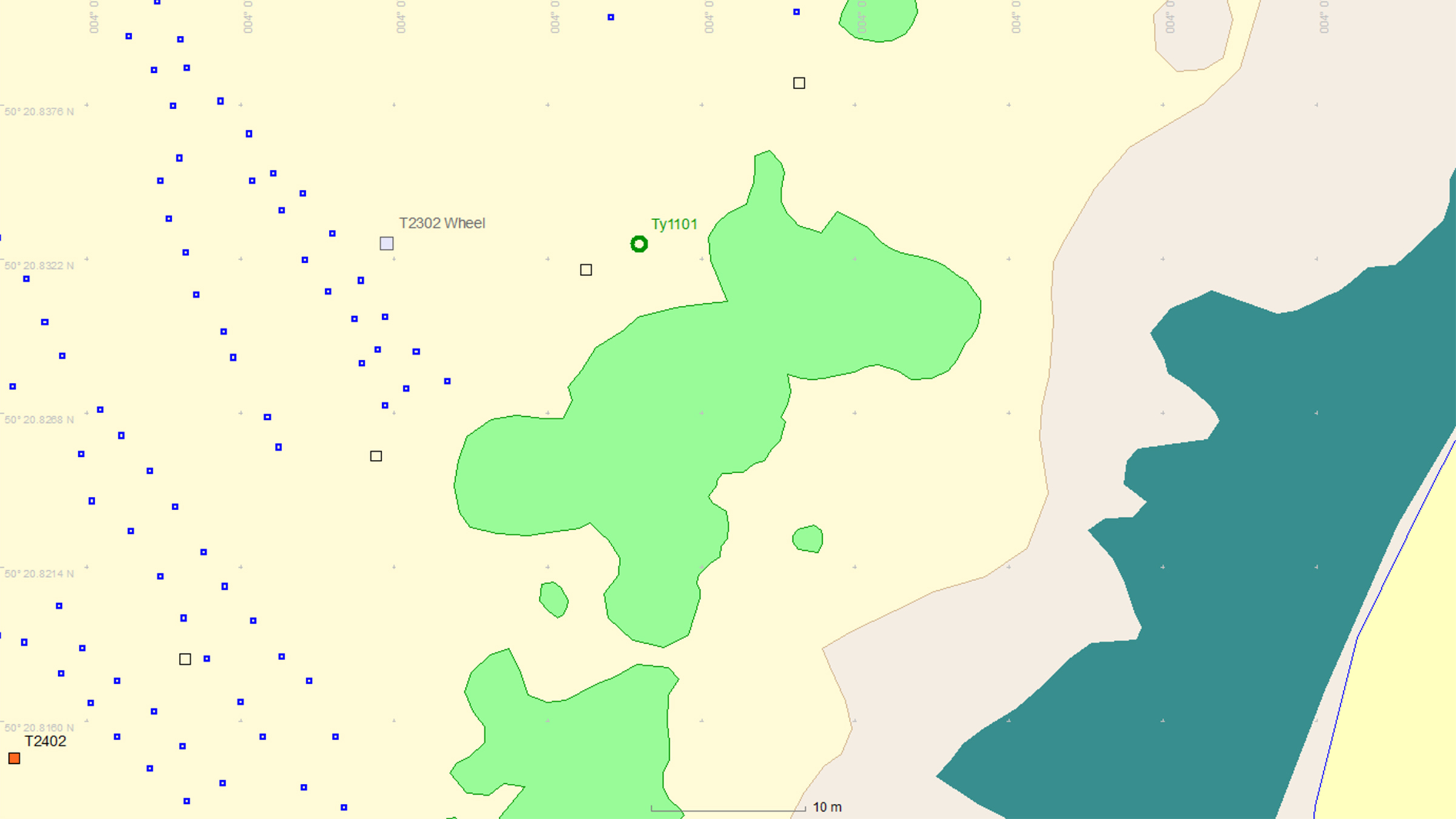
This is where Sonardyne and Wavefront Systems come in. The solution, which combines Sonardyne and Wavefront technology, is a survey boat carrying Solstice MAS™ (Multi-Aperture Sonar) as well as a SPRINT-Nav Mini mounted to a pole, deployed over the side of the boat; this maps the chosen area in 200 m wide strips. Once this survey has been completed, the sonar data that has been captured is then processed to create a map of the seagrass in a GIS. A Remotely Operated Vehicle (ROV) is then sent to the same area to ground truth features on the seabed to check that they are how they have been interpreted by Solstice MAS. The ROV is fitted with SPRINT-Nav Mini, allowing us to track its position underwater and guide it, using the map, to the features identified by Solstice; the ROV is also fitted with a camera and the recorded video can be used to create 3D models of the seabed.
Wavefront Systems’ Solstice MAS uses sound signals to produce high-quality images of the seabed, capable of creating images 200 metres wide at high resolution even in shallow water environments, all while consuming very little power. The Solstice family of sonars are built on unique MAS technology and are designed to fill the gap between standard side scan sonars, which are typically simple in design but give low image resolution, and Synthetic Aperture Sonars (SAS), which are expensive, more susceptible to complete data loss due to platform movement and also produce vast amounts of data. In order to execute more detailed mapping, Solstice MAS requires a high quality navigation sensor, which in this case is SPRINT-Nav Mini.
SPRINT-Nav Mini is an all-in-one vehicle guidance and navigation instrument, which combines AHRS data, Doppler Velocity Logger (DVL), Inertial Navigation System (INS) and depth sensor into a single housing. Having SPRINT-Nav Mini fitted onto the ROV provides positioning input, as well as attitude and heading data.
Creates images
0
m
at high resolution
ROV fitted with
0
D
camera
Solstice creates images
0
m
each side of the vessel
Adopting these technologies on such small versatile platforms opens the possibility of high-grade survey data in shallow waters. As a result of the cross Covelya Group collaboration between Sonardyne and Wavefront Systems, a high-definition map of seagrass beds can be created with a greater degree of accuracy than was previously possible with more traditional methods.
A seagrass restoration project conducted by the Ocean Conservation Trust (OCT) in Plymouth Sound, which involves monitoring, conserving and expanding the existing seagrass beds can be enhanced with the use of an ROV which has SPRINT-Nav Mini fitted to it. To help grow the existing seagrass beds, the OCT are placing seagrass mats on the seabed in Plymouth Sound. A survey boat fitted with Solstice and SPRINT-Nav Mini followed by an ROV fitted with SPRINT-Nav Mini can then be used to monitor and create a map of where these mats have been placed so that they have a better understanding of the success of the restoration and expansion project.
Operating a small robotic platform in any marine environment is not without its challenges. Reliability and precision with accurate positioning data are key for safe operations and where repeat inspections or surveys are needed.
The size of the platform may present its own limitations, restricting the size and weight of any payload and therefore the extent of its operational capabilities. Environmental or locational factors may also play a part in the reliability of operations. Most navigational and positioning payloads use magnetic compasses to provide heading. This reliance on magnetic heading makes the platform susceptible to interference from ferrous materials in its surroundings. These could be wind turbine or energy platform monopiles, wreckage or unexploded ordnance (UXO) on the seabed, the presence of vessels / submerged infrastructure in harbours and coastal locations or even just naturally occurring ferrous minerals in the seabed.
These factors introduce heading errors that compromise the supervised autonomous functions of the platform, particularly when following line headings between reciprocal bearings. Even minor heading inaccuracies can cause cumulative deviations over extended missions, leading to imprecise data and potentially requiring time-consuming survey line re-runs.
Any inaccuracies during survey when locating UXOs are particularly unwelcome, by their nature most UXOs are located based on magnetic signature. So, any poor navigation during the wide area or detailed UXO survey can be misleading and potentially dangerous. With repeat inspections of monopiles, for example, ensuring the survey platform returns to the exact same spot on each visit is important to ensure no anomalies or potential problems are missed.
The challenge
Atlantas Marine are a market leader in ROV inspection services
They are regularly called upon to inspect an area for UXO prior to operations or to survey installations at sea. One such example was at the Port of Dover in the UK where Atlantas Marine deployed a VideoRay Defender equipped with an Oculus M750d Multibeam sonar for high-resolution imaging and an ELWAVE TetraPulse system to search for UXOs prior to the deployment of a jack up vessel for remedial work in the port. At the time of the survey, Atlantas Marine’s VideoRay Defender ROV relied on a magnetic compass for its Attitude and Heading Reference System (AHRS) for navigation and orientation. Richard Stanley, Project Leader at Atlantas Marine explains the mission;
“During the subterranean survey, we utilised a skid-mounted system beneath the ROV equipped with four electrodes to measure electrical impedance up to 2 metres from the vehicle (ELWAVE TetraPulse), targeting both ferrous and non-ferrous UXO’s. In the target-rich environment of the port, ferrous objects affected the magnetic compass within the AHRS, resulting in a heading drift of approximately 5-10°.”

Heading accuracy
0.15°
Regardless of the environment
Depth rating
0
m
Weight in water
0.6kg








The solution
Recognising the need for precise navigation for smaller survey and inspection robotic vessels, Sonardyne set about finding a solution. For over a decade the SPRINT-Nav family of hybrid navigators have combined INS, DVL and pressure sensors with either Ring Laser Gyro’s (RLGs) or fibre optic gyro compasses (FOG). Unlike most standard fit ROV heading sensors, FOGs don’t rely on magnetic North for positioning and so their operation is not affected by any ferrous objects around them.
Having the technology was one thing, but there was the additional challenge of making it small and light enough to work with vehicles that are often less than a metre in length and only a few kilograms in weight themselves. They also often need to be launched by hand and carried onboard larger vessels, so the size of the payload is imperative.
In response to this challenge facing many small ROV operators like Atlantas Marine, Sonardyne developed SPRINT-Nav U, the world’s smallest hybrid navigator, combining INS, DVL and a pressure sensor in one factory calibrated unit.

“Historically, smaller electric vehicles have been limited in the amount of work they are capable of due to size, power and operational limits presented by weather conditions and surroundings.
Recent iterations of handheld ROVs such as the VideoRay Defender have looked to change what electric ROVs are capable of, while maintaining a platform that is easy to mobilise, operate and maintain. That said, the ROV is only as powerful as the tooling that it holds, so it still requires support from companies such as Sonardyne, to reduce the form factor and weight of their tools and sensors, to enable their integration and deployment offshore.
Atlantas Marine have already been utilising the SPRINT Nav Mini to great success on our Ocean Modules V8 M500 platform, but the latest SPRINT-Nav U will allow us to go further and integrate it onto our VideoRay Defender ROVs, and provide another service that we can offer our customers – a hand-launched ROV, that can be mobilised in as little as half an hour, transported to site in the back of an car” Mark Salter, Senior Project Manager, Atlantas Marine.
“Like the other hybrid navigators in the SPRINT-Nav family, SPRINT-Nav U’s true north seeking gyrocompass means that it delivers reliable subsea navigation even when in close contact with the types of environmental factors outlined above. With its ultra-compact form factor (135mm X 114mm) and a weight in water of just 0.6kg, SPRINT-Nav U gives unrivalled navigation capability to small marine robotic system allowing users to maintain a heading accuracy of 0.15° regardless of environmental factors.
“SPRINT-Nav U has been designed with our customers in mind. We’ve been speaking to them for a number of years about their aspirations for operations with small platforms. With the help of valued customers like Atlantas Marine, our trials have demonstrated a variety of use cases for this new, compact navigator and we’re excited to work on many more innovative uses in future.” Aidan Thorn, Business Development Manager – Marine Robotics, Sonardyne.
Small, light, precise
SPRINT-Nav U is simple to integrate into any marine vehicle along with other payload sensors and uses same field-proven web user interface found on the SPRINT-Nav Mini. Pre-calibration in the factory also means that SPRINT-Nav U is incredibly quick to set up and deploy on site with an alignment time of as little as five minutes, compared to the standard 15-20 minutes of other gyrocompassing inertial navigation systems, making it the world’s fastest aligning hybrid navigator.
“SPRINT-Nav U can turn any marine robot into a survey grade platform. For UXO and asset inspection it drastically improves deliverable data quality. As part of the proven Sonardyne SPRINT-Nav family, customers can be assured of reliable, accurate navigation and positioning every time, no matter the operating environment.” John Houlder, Senior Product Manager, Sonardyne.
The results
Keen to offer their clients a solution for operating in new or challenging locations, Atlantas Marine were happy to put SPRINT-Nav U through its paces as soon as it became available. Vobster Quay in Somerset, UK, provided an excellent proving ground as the flooded former quarry contains the wreck of a plane and many other ferrous objects in up to 36 metres of water.
A combined team from Atlantas Marine and Sonardyne deployed a VideoRay Defender equipped with a SPRINT-Nav U payload manually from quayside in Vobster Quay, and after taking around five minutes to align, the Defender was soon navigating the quarry.
Using Greensea software, the Defender was able to successfully perform precise box and lawn mower survey patterns – with less than 0.1% error as a percentage of distance travelled – over the plane wreck without the ferrous materials affecting the navigation.
“Of particular significance to us, is the work we undertake on offshore wind turbines. With a high AC voltage running through the subsea cabling, and the strong magnetic signatures associated with that, plus the ferrous nature of the turbines themselves, the SPRINT-Nav U allows us to offer our customers a level of accuracy and precision that was previously not possible. It allows us to state with much higher confidence the location of any faults and anomalies, and allows us to repeat inspections, year on year, as we document the changing condition of those faults. With the positioning and control managed through Greensea, we can set up autonomous routes and sea patterns with more accuracy and precision than even before, especially in the environments we most commonly find ourselves.”
Mark Salter, Senior Project Manager, Atlantas Marine.
“Providing improved accuracy when operating in ports and areas where large metallic objects are buried on or beneath the seabed, improves not only the reciprocal bearings of the lanes the ROV is flying, but feeds a more accurate heading into the navigation solution which is streamed to the surveyor.
Beyond seabed surveys, the ability to maintain a stable heading while piloting a compact inspection-class ROV through culverts with rebar or complex subterranean tunnels is a key advantage. It reduces the need for frequent heading corrections and ensures precise navigation when traversing long distances. This ultimately enhances the quality of deliverables for our clients, providing us with a competitive edge when deploying our equipment.”
Richard Stanley, Project Leader, Atlantas Marine