
Imagine survey-grade navigation, now quite literally in the palm of your hand. SPRINT-Nav U, the revolutionary compact hybrid navigator, is here to transform your operations. But how do we guarantee its precision? By subjecting it to the most demanding tests imaginable. Journey with us as we reveal the meticulous process that ensures SPRINT-Nav U delivers unmatched performance, every time.
SPRINT-Nav U is the latest addition to the SPRINT-Nav product family. As the world’s smallest hybrid acoustic-inertial navigator, it has been engineered to deliver survey-grade navigation performance in the most compact and lightweight package. In this blog, we explore the rigorous testing completed during its development, demonstrating our confidence in its capabilities.
SPRINT-Nav U is a complex instrument that fuses IMU data with a 0.01% full-scale pressure sensor and Sonardyne’s Syrinx DVL. Our validation testing has evaluated the performance of each system component individually and how they combine to deliver optimal performance.
How, what and why we test and calibrate
IMU Performance
The fibre-optic gyroscope (FOG) based inertial measurement unit (IMU) in SPRINT-Nav U is characterised using our temperature-controlled motion table. The table executes a 24-hour test cycle, completing predefined motion patterns over the full operating temperature range (-30°C to +60°C), enabling us to measure the error characteristics of the sensor precisely. The sensor misalignments, biases, noise, and scale factors are confirmed and then modelled against temperature within the navigation system.
Measuring the characteristics of an IMU is vitally important for SPRINT-Nav. This process allows us to understand how the sensor will behave within the dynamics of a subsea environment. This enables us to model it correctly within the navigation algorithms and achieve optimal performance.
Further validation of the IMU’s performance was carried out through extensive static and dynamic testing using our test vessels in Plymouth, UK. Here, we evaluated the IMU’s dead-reckoned navigation performance against external references such as RTK GNSS and its attitude and heading performance against top level navigation SPRINT-Nav X units.


DVL Performance
To evaluate bottom-tracking robustness and maximum altitude, the unit was tested in a variety of challenging environments. This included ultra-low altitude testing (down to 25 cm) over sandbanks (Figure 3), operations in quarries with steep sides and manoeuvring around structures (see the case study here).
For further validation, the unit was deployed in Loch Ness, Scotland (Figures 2 and 4) to assess high-altitude performance. This environment presents a unique challenge for DVLs with its soft clay seabed, which dampens acoustic returns, and its steep, variable bathymetry affecting the amount of returned signal. Acoustic backscatter is a function of frequency, incidence angle, and seabed material type. For the SPRINT-Nav U which operates at 500 kHz, the achievable altitude when operating over rock is approximately 30m greater than mud.
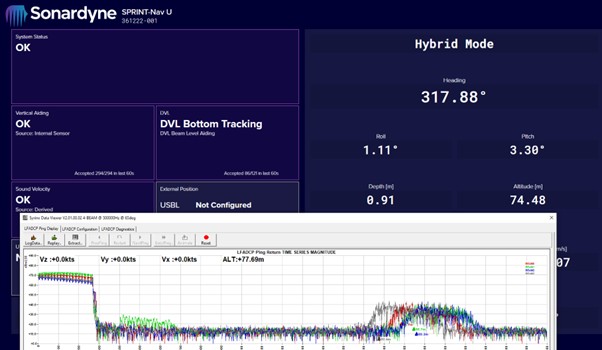
The SPRINT-Nav U performed well, robustly bottom tracking at between 75m and 100m depending on the terrain. Figure 4 highlights the achieved 75m range in Loch Ness. For the purpose of altitude calculation, Sonardyne treats all beams independently, publishing the median value to a vehicle control system.

System Performance
The most effective way to validate system performance is through testing in diverse real-world conditions. Throughout the development and testing cycle of SPRINT-Nav U, we conducted multiple rounds of sea trials, each beginning with a DVL calibration run. We then independently assessed distance from origin (DFO) accuracy and typical survey performance using 1 km run lines and survey lines. In these controlled tests, the development units consistently met the SPRINT-Nav U specifications of 0.45% DFO and 0.1% typical survey.

The plots below present example results from one of these tests. The first plot (Figure 6) shows the vessel trajectory during the 1km transits (minutes 216-235) and follow-up survey lines. Figure 7 shows the accumulated error as a percentage of the distance travelled. The results show the unit performing well within the 0.1% specification.


To further evaluate its capabilities, we tested the system across different depths, seabed types, and sound velocity profiles, as well as longer-term station-keeping and drift trials to ensure the performance remains robust for any environment or application. We’ll share the results of these in further SPRINT-Nav U blogs later this year.
Summary
The SPRINT-Nav U has undergone extensive testing to prove it will deliver survey-grade navigation performance in diverse environments and applications. By combining advanced technology with uncompromising quality in the smallest form factor available, SPRINT-Nav U represents not just an evolution in underwater navigation technology but a revolution that will enable new possibilities for underwater operations where size, weight, and performance are critical factors. As demonstrated through our comprehensive testing programme, you can deploy SPRINT-Nav U with complete confidence that it will deliver survey-grade navigation performance in even the most demanding underwater environments and on smaller robotics platforms than before.
For full product information, please see the SPRINT-Nav U product page. If you have a challenge for SPRINT-Nav U or any of our products, please contact us.