Over the coming weeks, our Marine Robotics and Offshore Renewable Energy Business Development Managers Aidan Thorn and Mike Ellis will be delivering a series of blogs and a white paper on the use of marine robotics for planning, monitoring, communications and positioning in offshore wind farms.
To begin the series, we look at how robotics are currently used in the marine environment and consider how they might be utilised in future offshore wind projects.
Floating offshore wind farms, maintained by robots – pipedream or possibility?
It’s certainly possible, but how close are we to realising it? With wind overtaking gas as the primary source of UK electricity for the first time in May 2023 (figures from Imperial College London), and with most of that generated offshore, the demand for cost effective renewable energy in the UK is set to increase further.
It’s a global trend. The Global Wind Energy Council (GWEC) Global Wind Report 2023 predicts that 2023 will be the first year to see more than 100 GW of new wind energy capacity added globally. Whilst the majority of this is onshore production, the offshore share of the market is steadily increasing.
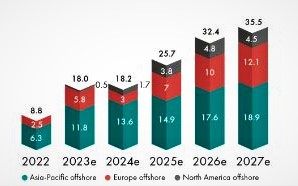 Predicted Global Offshore Wind Installations (GW) 2022-2027 (GWEC Global Wind Report 2023)
Predicted Global Offshore Wind Installations (GW) 2022-2027 (GWEC Global Wind Report 2023)
According to GWEC, the top five markets for new wind installations in 2022 were China, the USA, Brazil, Germany and Sweden – accounting for 71% of global installations of both on and offshore wind farms. When it comes to offshore energy production, 99% of the global offshore wind installations are in Europe and the Asia Pacific region. With land often at a premium, surely the rest of the world will follow suit and look offshore for their energy, but at what cost?
According to the Offshore Renewable Energy (ORE) Catapult, about 40% of a fixed offshore wind farm’s cost is underwater. As the industry looks towards floating wind farms to meet demand, it’s a safe assumption these costs will rise when we consider that in the oil and gas industry typically 70% of the installation and maintenance costs are spent on the underwater floating assets.
“We need to start thinking beyond infrastructure in its current form to one which enables cost effective, remote and continuous inspection, repair and maintenance (IRM) strategy through the use of marine robotics.” Mike Ellis, Business Development Manager – Offshore Renewable Energy, Sonardyne
Surveying and constructing
With escalating operational costs and growing concerns over the environmental impact the default of using large vessels for site surveys is beginning to change, especially in the consenting phase of offshore wind farm construction. By using marine robotics for seabed surveys, we can build in lower cost, reduced carbon and increased reliability. If we implement an infrastructure to support effective monitoring and marine robotics at the start of a wind farm lifecycle before operations begin, operators can realise project savings much earlier.
“Over the last decades, we’ve seen some examples of poor geophysical and geotechnical data acquisition. As wind farms go deeper for floating platforms, deep-water autonomous underwater vehicles (AUV’s) that fly at low altitude for high-level resolution bathymetric and geophysical data should be considered. For example, the Morro Bay floating wind farm site in California will be between 1000 m and 1250 m deep, a surface vessel with high-res capabilities to cover a site of this acreage would prove vastly more expensive compared to mission planning an AUV from a small local port.” Mike Ellis, Business Development Manager – Offshore Renewable Energy, Sonardyne
Several developers are already using Uncrewed Surface Vessels (USVs) with our products for site characterisation and bathymetric surveys. Here, USVs can harvest current, wave and other scientific measurements from our Origin Acoustic Doppler Current Profilers (ADCPs) using one of the Ultra Short Base Line (USBL) systems or modems as a communication gateway. At the same time, the USBL system can also be used for positioning any towed equipment from the vehicle such as a magnetometer or side-scan sonar during a hydrographic survey.
“We’ve already been working with USV developers to show how marine robotics can be used for rapid data harvesting. For example, HydroSurv’s REAV-40 USV was fitted with our Mini-Ranger 2 USBL system to demonstrate rapid environmental collection to a group of stakeholders in the Valorous floating offshore wind project. Data harvesting while conducting a survey is a great way to save money and add to the information value chain.” Aidan Thorn, Business Development Manager – Marine Robotics, Sonardyne
During the construction phase of an offshore wind farm, it is important to ensure the area is clear of any hazards before running cables and piling in monopiles, so Remotely Operated Vehicles (ROVs) will typically conduct surveys for Unexploded Ordnance (UXO). However, we now have more conversations about USVs with onboard ROVs or using towed platforms to carry out this operation.
It opens up a multitude of additional operations that could also include identifying and removing classified UXOs using our wireless Initiation Transponder 6 (IT6) (see picture and link below), piling inspection support using imaging sensors, and cable depth of burial measurement.

A small inspection class, ROV attaching the wireless IT6 to a UXO
As wind farms go over the horizon, so will the robotics
We’re already seeing an increasing number of high-endurance, long-distance AUVs, like Cellula Robotics’ Solus LR AUV and the National Oceanography Centre’s Autosub Long Range being used in the field.
These are progressively capable of lengthy inspection missions and, used in conjunction with the relevant products, are ideal for monitoring and data harvesting from sensors deployed in and around offshore wind farms. This will become increasingly useful for geophysical site surveys conducted as we see developments in deeper waters, further offshore.
Most critically however, these over-the-horizon robotics rely on accurate and reliable navigation. Using a hybrid Inertial Navigation System (INS) from our SPRINT-Nav family provides a stand-alone platform with both altitude and heading, plus continuous navigation without a GPS update. This creates a reliable secondary system in the event of a lost satellite position.
Offshore robotics 24/7?
As these vehicles become increasingly viable, so does the prospect of having field-resident AUVs. Field resident robotics can carry out routine and on-demand surveys and inspections within a wind farm without the constant need to return to a mother ship. This would allow for more efficient and cost-effective operations while also reducing the risk of human error. AUVs can be equipped with advanced sensors and cameras to collect data and monitor wind farms in real-time.
We’re already seeing several companies delivering subsea vehicle docking, for example, Modus with their Saab Sabertooth AUV’s and Oceaneering’s Freedom vehicle. These agile (six degrees of freedom) vehicles are also very well suited to floating wind farm IRM operations, as the complexity of navigating between hundreds of moorings and dynamic cables increases significantly.
“I believe having vehicles that can sense and pivot around infrastructure without an umbilical will be essential to the adoption of these systems. This technology will likely be implemented first from vessels but has a long-term future in residence. The potential benefits of this technology are immense, and it could revolutionise the way we manage and maintain wind farms in the future.” Aidan Thorn, Business Development Manager – Marine Robotics, Sonardyne
Using acoustic communications, like the USBL positioning system with high bandwidth telemetry capability, via subsea docking stations, these vehicles can be positioned and data can be offloaded. They can even download new mission plans without surfacing. But let’s discuss this further in our next blog post.
Moving offshore wind turbines into deeper waters will tap vast new areas of potential wind energy. But moving dynamic systems into an even more dynamic environment comes with its challenges, not least when it comes to dynamic cable monitoring, protection and management.
If there’s one thing we’ve learned from the past three decades of building offshore wind farms, it’s that the offshore environment is highly dynamic. There are a multitude of constantly shifting factors that we need to consider, above and beneath the waves, from leading edge erosion to the protection and management of power cables.
So what will happen when we evolve our wind turbines from fixed structures into floating structures in deep water? Put it another way, what happens when we introduce a dynamic system into an even more dynamic environment? One answer is that we get more yield and access to more capacity. Another answer is that we open up a new world of dynamic and environmental complexity.
There is a lot that the industry has already learned, the hard way. We’re talking better understanding of cable protection systems, cable depth of burial and free spans. I think it’s fair to say that the industry slightly underestimated the impact of the subsea environment in these areas. We have come a long way.
A new focus on dynamic cable monitoring
But, as we move turbines from static foundations onto dynamic platforms and into even more dynamic environments, there will be even more to learn, particularly around cable behaviour, protection and management. In these environments, cable behavioral patterns will differ, even within a localised area, due to small variations across the subsea environment, as well as variations in catenary designs. Export and cable arrays will now be exposed to potentially damaging factors such as:
- Hydrodynamic drag forces,
- Touch down point migration
- Cable compression
- Protection sleave movement
- Platform induced motion
- Vortex-induced vibrations
The challenge is to understand these forces so that we can resolve or counteract them, which becomes more important as our individual assets – reaching and going beyond 15 MW – represent an ever-greater proportion of our project. While we can build models, they only get us so far without having to build in large error margins due to the level of uncertainty involved in a design. So, we need real-world data.
Learning at the floating wind demonstration phase
At the demonstration stage, real-world dynamic cable monitoring data will allow us to enable, teach, and verify our models. But as we move into commercial-scale operations, it will help to reduce our error margins and increase safety, efficiency and yield – reducing project risks and long-term costs. Longer term, it will provide assurance of fatigue life and system performance and enable us to predict and remedy faults before they cause system outages, helping to rationalize maintenance regimes and be more confident when it comes to field life extension.
Five decades underwater positioning and monitoring
With our underwater acoustic and inertial systems, twinned with smart analytics, we’ve been helping operators understand how their underwater infrastructure is influenced by dynamic subsea environments for decades.
In fact, at Sonardyne, we have been positioning and monitoring underwater infrastructure since it was founded in 1971. We’ve been there, from the very first tension leg platform, Hutton, in 1983, through to complex deepwater floating production, storage and offloading vessel mooring and riser systems. We’ve learned how to integrate a combination of wireless subsea technologies to create a subsea integrated network that gives operators a full, real-time picture of dynamic behaviors. These range widely, from pipeline buckling and blow-out preventer inclination through to vortex-induced vibration of risers, including automated alerts and warnings when systems move out of set parameters.

Marine risers – a behavioral equivalent to power cables, delivering energy in its liquid or gaseous form to the surface – are often subject to significant forces through the water column. By monitoring them with an integrated suite of wireless subsea acoustic sensors, operators can better calculate the fatigue life of the subsea infrastructure and monitor for any events deemed outside their operating envelope. This could be points deemed most susceptible to cause catastrophic failure, such as the tether and anchor line and the touchdown point. Exactly the same can be done for floating offshore wind infrastructure.

SMART technology for subsea monitoring and analysis
Our SMART technologies have everything you need to measure cable and ancillary system, mooring lines and subsea environment behaviour, whether that’s using a SMART transponder to measure high-frequency vibration at the bend restrictor or seabed mounted inverted positioning system to measure the position of a slow oscillating dynamic cable. SMART stands for Subsea Monitoring, Analysis and Reporting Technology. That’s also because they’re easy to interface with third-party sensors, for example, a strain gauge to monitor load or tension on either the cable ancillary system or mooring lines.
The SMART transponders will report back to our seabed-mounted SMART technology hub that supports edge analytics, so you can manage the information you want, when you need it, not just a mass of data. Most of our instruments are capable of long-term deployment (i.e. up to at least 10 years, with our existing batteries) and support both on-demand data retrieval or send alerts when a threshold or pre-programmed metric is hit.
Building a bigger picture with current data
To build a wider, holistic picture, we would also recommend gathering underwater environmental data, using acoustic Doppler current profilers (ADCPs). These can also be integrated into our wireless network. Leaving ADCPs on the seabed and harvesting data throughout the entire wind farm lifecycle will lead to larger data sets that enable more accurate simulation and predictive modelling of the subsea environment.
Scalable dynamic cable monitoring systems to suit all sites
However, we see that not all floating offshore wind farm sites are born equal. Topography and metocean characteristics, such as water depth, current regimes and seabed characteristics, will differ between arrays. Where there’s a greater confidence in the characteristics at one site or more stable weather patterns, you might want to “spot” monitor one or two turbine locations early in your project life, to verify and build confidence your existing models for the entire farm. Where there’s a higher level of uncertainty or environmental risk, such as, northern North Sea, offshore Brazil or in the Gulf of Mexico, where there are complex current and eddy regimes, you may want a more comprehensive monitoring system or even to monitor throughout field life to better predict and manage cable behaviour. The options are easily scalable and tailored to individual sites.
If you want to learn more about the dynamic behaviour characteristics of the dynamic cables in your floating offshore wind farm by gathering real-world data, contact our team.
Underwater positioning equipment from Sonardyne Asia Pte Ltd. has been selected by PDE Offshore Corporation to support its work on wind farm construction projects offshore Taiwan.
The company has ordered a Mini-Ranger 2 Ultra-Short BaseLine (USBL) system and Wideband Sub-Mini 6+ (WSM 6+) transponder/responders to accurately track the position its underwater equipment, which includes a seabed frame used to guide geotechnical corers.
The Mini-Ranger 2 will be installed and operated from PDE Offshore’s 72-metre long survey vessel, MV Geo Energy, which is scheduled to spend this summer working in the Taiwan Strait, evaluating proposed locations for turbine foundations..
Mini-Ranger 2 is built around Sonardyne’s 6G hardware and Wideband 2 digital acoustic technology platforms. At its heart is HPT 3000, a highly capable surface-deployed USBL transceiver optimised for performance in shallow water, as well as high elevation and long lay back operating scenarios and data telemetry.
The size and positioning performance of WSM 6+ makes it a transponder choice for fitting to and tracking underwater vehicles and equipment. Its built-in depth sensor improves USBL precision, while a responder mode allows fast moving targets to the tracked at the highest possible update rate.
[blockquote author=” Huang Hsin-chih, president of PDE Offshore”]”Where we work in the Taiwan Strait, water depth is from 20 to 60 meters; in the future, there might be a chance to work in offshore wind farm with water depth from 50 to 200 meters, so whilst we do need a very precise USBL, we don’t need the one that’s full ocean depth capable. Through renting, we have become familiar with Mini-Ranger 2 and the benefits it’s brought to our busy geotechnical operations. So it was a simple choice to decide to go ahead and purchase one of our own.”[/blockquote]
Dan Tan, Regional Sales Manager for Sonardyne in Singapore, says, “Taiwan’s ambitions of becoming a green island means it is fast becoming a leading player offshore wind in Asia Pacific. We’re pleased to be a part this energy transition through PDE Offshore’s investment. Although this will be a permanent installation, Mini-Ranger 2 is also a great option for moving between vessels and even unmanned surface vessels (USVs).”